Да, спасибо, все подробно и детально расписано и с беговой дорожкой и с попутным ветром разгоняющим болид.
Если не трудно
распишите пожалуйста вот этот случайНет, вы давайте ясно говорите, что там не понятно. Я не могу догадаться.
Ну вот, я получил ответ на этот вопрос от конструктора этого аппарата Рика Кавалларо. Думаю, он многим будет интересен.
Цитата:
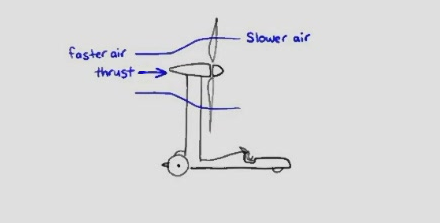
The version in the video you linked was the cart prior to adding variable pitch. That makes starting, and initial acceleration, even slower since the pitch is more or less optimized for higher speed performance. Keep in mind that the tailwind, when it's standing still, is trying to turn the prop backwards like a turbine, and thus fighting the wheels effort to turn it like a prop. With variable pitch I can reduce that fight to basically zero. But even then, the wind is only pushing on the blades as a bluff body (i.e. stalled), which really doesn't give us much to work with.
Well, there's a lot going on there, so you may have to ask follow-up questions if I don't hit the points you're interested in. This was one of our first tests. We didn't yet employ the variable pitch mechanism or add the fairings and such. We had already demonstrated that it would start from a dead stop and achieve DDWFTTW steady state, but it was super slow getting there and took up a whole lot of real estate doing so. Based on the wind direction, our "runway" was somewhat limited (before running into the rocks at the edge of the dry lake). So we decided to do some runs where we push it up to wind speed, and have more distance to evaluate its DDWFTTW performance before going back to the lab to add the finishing touches.
I don't recall what speed we achieved on that run, but the fastest I had recorded on any run was 54 mph.