Извините, что долго не отвечал. На работе программа падала (порча памяти), было не до форума

. За это время накопилось несколько интересных вещей о которых я сейчас расскажу.
Во-первых, думаю мне надо бы прокомментировать часто упоминаемую формулу из ЛЛ2:

$$")
Такой трёхмерной метрикой обладает трёхмерное пространство системы отсчёта движущейся с четырёхскоростью
}_{\mu} = \frac{g_{0 \mu}}{ \sqrt{g_{00}}} \qquad \text{или в контравариантной записи:} \qquad
e^{\mu}_{(0)} = \frac{g^{0 \mu}}{ \sqrt{g^{00}}}. \eqno(2)
$$")
Во-вторых, я научился находить триадные компоненты трёхмерного тензора кривизны трёхмерного пространства произвольной системы отсчёта не зная трёхмерных координат. Зная трёхмерные координаты любой дурак сможет, а вот попробуйте не зная
. Дело в следующем. Вот у нас есть, значит, четырёхмерное пространство событий, в нём четырёхмерная система координат

. Произвольно берём какую-то систему отсчёта
} = e^{(a)}_{\mu} \; dx^{\mu}$")
. Для этой системы отсчёта в бесконечно малой окрестности каждой четырёхточки
(там где эта система отсчёта определена) определён и бесконечно малый кусочек трёхмерного пространства одновременности с триадой
}, {\mathcal E}^{(2)}, {\mathcal E}^{(3)}$")
такой что:
} = 0, \\
{\mathcal E}^{(1)} = e^{(1)}, \quad
{\mathcal E}^{(2)} = e^{(2)}, \quad
{\mathcal E}^{(3)} = e^{(3)}. \eqno(3)
\end{cases}
$$")
Уравнение
}_{\mu} dx^{\mu} = 0$")
говорит, что в бесконечно малой окрестности точки
на трёхмерном пространстве одновременности линейно независимыми являются
три из четырёх дифференциалов

. То есть триада трёхмерного пространства
в окрестности каждой четырёхточки
определена на линейной комбинации трёх линейно независимых дифференциалов, как и положено для трёхмерного пространства. И тут не важно что сами-по-себе трёхмерные координаты

нам не известны, мы можем работать с компонентами триады как с функциями от четырёхмерных координат
и этого будет достаточно для всех случаев жизни. Например, мы можем найти триадные компоненты трёхмерного тензора кривизны как функции
.
Для четырёхмерной тетрадной связности
}}_{(b)}$")
и для четырёхмерной кривизны
}}_{(b)}$")
по определению имеем:
} + {\omega^{(a)}}_{(b)} \wedge e^{(b)} = 0,
\qquad
{\omega^{(a)}}_{(b)} = {\omega^{(a)}}_{(b)(c)} \; e^{(c)} \eqno(4)
$$")
}}_{(b)} = d {\omega^{(a)}}_{(b)} + {\omega^{(a)}}_{(c)} \wedge {\omega^{(c)}}_{(b)},
\qquad
{R^{(a)}}_{(b)} = \frac{1}{2} {R^{(a)}}_{(b)(c)(d)} \; e^{(c)} \wedge e^{(d)}. \eqno(5)
$$")
Аналогично для трёхмерной триадной связности
}}_{(j)}$")
и для трёхмерной кривизны
}}_{(j)}$")
по определению имеем:
} + {{\Omega}^{(i)}}_{(j)} \wedge {\mathcal E}^{(j)} = 0,
\qquad
{{\Omega}^{(i)}}_{(j)} = {\Omega^{(i)}}_{(j)(k)} \; {\mathcal E}^{(k)}. \eqno(6)
$$")
}}_{(j)} = d {\Omega^{(i)}}_{(j)} + {\Omega^{(i)}}_{(k)} \wedge {\Omega^{(k)}}_{(j)},
\qquad
{{\mathcal R}^{(i)}}_{(j)} = \frac{1}{2} {{\mathcal R}^{(i)}}_{(j)(k)(l)} \; {\mathcal E}^{(k)} \wedge {\mathcal E}^{(l)}. \eqno(7)
$$")
Исходя из этих определений, а так же из связи
} = e^{(i)}|_{e^{(0)}=0}$")
легко получить следующую формулу:
}}_{(j)(k)(l)} - {{\mathcal R}^{(i)}}_{(j)(k)(l)} =
{\omega^{(i)}}_{(j)(0)} \left( {\omega^{(0)}}_{(k)(l)} - {\omega^{(0)}}_{(l)(k)} \right)
+ {\omega^{(i)}}_{(0)(k)} {\omega^{(0)}}_{(j)(l)}
- {\omega^{(i)}}_{(0)(l)} {\omega^{(0)}}_{(j)(k)}. \eqno(8)
$$")
По этой формуле триадные компоненты трёхмерного тензора кривизны
}}_{(j)(k)(l)}$")
выражаются через пространственные тетрадные компоненты четырёхмернго тензора кривизны
}}_{(j)(k)(l)}$")
и через пространственные
$")
-компоненты тетрадной связности.
Давайте применим эту технику для задачи о неравномерно вращающейся карусели
$")
.
Метрика в цилиндрических координатах:

$$")
Покоящаяся система отсчёта:
} = c \, dt, \quad
\bar{e}^{(1)} = dr, \quad
\bar{e}^{(2)} = r \, d\varphi, \quad
\bar{e}^{(3)} = dz. \eqno(10)
$$")
Неравномерно вращающаяся система отсчёта получается Лоренцевским бустом в плоскости
} \wedge \bar{e}^{(2)}$")
:
} = \frac{c \, dt - \frac{r^2 \omega(t)}{c} d\varphi}{\sqrt{1 - \frac{r^2 \omega(t)^2}{c^2}}} \quad
e^{(1)} = dr, \quad
e^{(2)} = \frac{r \left( d\varphi - \omega(t) dt \right)}{\sqrt{1 - \frac{r^2 \omega(t)^2}{c^2}}} \quad
e^{(3)} = dz. \eqno(11)
$$")
Отличные от нуля компоненты тетрадной связности:
}}_{(1)(2)} = - \frac{1}{c} \frac{\omega(t)}{ 1 - \frac{r^2 \omega(t)^2}{c^2} }, \quad
{\omega^{(0)}}_{(1)(0)} = - \frac{1}{c^2} \frac{r \omega(t)^2}{ 1 - \frac{r^2 \omega(t)^2}{c^2} }, \quad
{\omega^{(1)}}_{(2)(2)} = - \frac{1}{r} \frac{1}{ 1 - \frac{r^2 \omega(t)^2}{c^2} },
$$")
}}_{(2)(2)} = \frac{1}{c^3} \frac{ r^2 \omega(t) \dot{\omega}(t)}{ \left( 1 - \frac{r^2 \omega(t)^2}{c^2} \right)^{3/2} }, \quad
{\omega^{(0)}}_{(2)(0)} = \frac{1}{c^2} \frac{ r \dot{\omega}(t)}{ \left( 1 - \frac{r^2 \omega(t)^2}{c^2} \right)^{3/2} }. \eqno(12)
$$")
}}_{(0)} = {\omega^{(0)}}_{(1)}, \quad
{\omega^{(2)}}_{(0)} = {\omega^{(0)}}_{(2)}, \quad
{\omega^{(2)}}_{(1)} = -{\omega^{(1)}}_{(2)}. \eqno(13)
$$")
Вычисленный по этой связности четырёхмерный тензор кривизны равен нулю как и должно быть для пространства Минковского.
Далее двумя разными способами вычисляем триадные компоненты трёхмерного тензора кривизны (по определению (7)) и как правая часть полученной мной формулы (8). Результаты независимых вычислений торжественно совпадают, для отличных от нуля компонент получаем:
}}_{(2)(1)(2)} = - 3 \left( {\omega^{(0)}}_{(1)(2)} \right)^2 =
- \frac{3 \omega(t)^2 }{ c^2 \left( 1 - \frac{r^2 \omega(t)^2}{c^2} \right)^2 } \eqno(14)
$$")
(остальные компоненты получаются перестановкой индексов с учётом антисимметрии тензора кривизны). Но именно таким тензором кривизны обладает трёхмерное пространство с метрикой:
^2}{c^2} } + dz^2. \eqno(15)
$$")
Метрике (15) неравномерность вращения
 \ne \operatorname{const}$")
глубоко безразлична.
Одно другому не мешает. Геодезисты живут в пространстве Минковского. Карусель тоже размещена в пространстве Минковского. А вот трёхмерная геометрия вращающейся системы отсчёта соответствует такому трёхмерному пространству, которое не может быть вложено в пространство Минковского. Такое ощущение, что у Вас от этого факта происходит что-то вроде взрыва мозга
.
От этого у меня не происходит никакого взрыва, к тому же это не факт, а неуместная интерпретация. Факт заключается в том, что локальное измерение расстояния является событием, которое обозначается точкой пространства Минковского. И когда мы хотим говорить о геометрии пространственного трёхмерия, то в каждой его точке должны быть выполнены соответствующие измерения расстояний. Именно поэтому каждой точке трёхмерия должна сопоставляться точка четырёхмерия, где (и когда) это измерение выполнено. А множество всех таких точек составляет гиперповерхность.
На этом факты заканчиваются и начинаются интерпретации. Например, интерпретация того, является ли это трёхмерие "вложением" в четырёхмерие. И с точки зрения формального определения вложения -- конечно не является, потому что метрика трёхмерия (см. формулу выше) это не то же самое, что метрика четырёхмерия. Но с точки зрения событий измерений -- трёхмерие является подмножеством четырёхмерия. На нём всего лишь метрика определяется иначе.
Обозначим четырёхмерные координаты
, а трёхмерные координаты

. В общем случае размещение точек трёхмерного пространства в четырёхмерном пространстве не является вложением, то есть не существует дифференцируемых функций
$")
. Точки идут "россыпью, гроздьями, фаршем". Однако пространственно подобные линии
$")
и
$")
в четырёхмерном и в трёхмерном пространствах друг другу соответствуют взаимно однозначно.
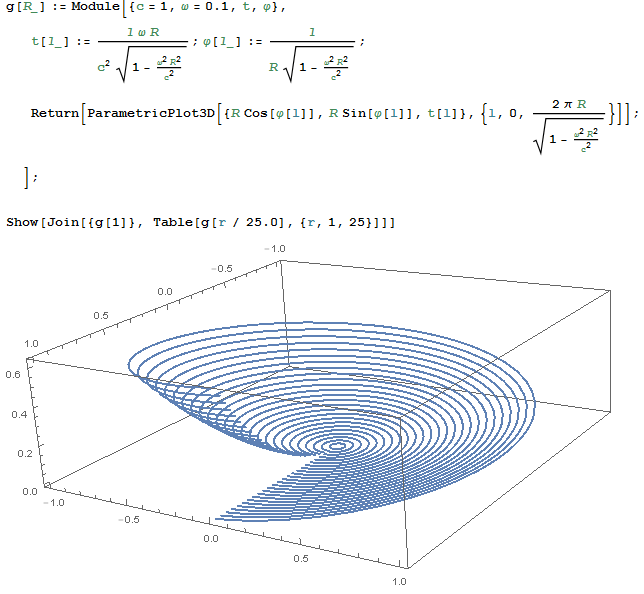
Ось-

на рисунке не показана. Каждая синяя линия обозначает не просто дугу окружности, а произведение дуги окружности на ось-
. Таким образом на рисунке синие линии обозначают двумерные поверхности в пространстве Минковского.
У Вас на рисунке синие линии красиво сложились в винтовую двумерную поверхность. Однако никакой такой поверхности (ортогональной мировым линиям точек карусели) на самом деле не существует.
Конечно не существует. Синие линии друг от друга строго изолированы. Там ж формулы перед рисунком написаны. То есть Вам, значит, вдруг привиделось, что синие линии как будто бы сложились в поверхность и Вы обвинили меня в том, что я якобы нарисовал поверхность, которой нет. Ну, обознались Вы малость.
Ну что же, поздравляю, в нашем с Вами споре Вы в конце-концов прибегли к такому приёму как прямая ложь. Все ходы записаны. Не отмоетесь.

Я мог бы найти и привести в подтверждение соответствующие цитаты. Однако не считаю нужным оправдываться перед явным демагогом. Так что пусть Ваше обвинение меня во лжи останется на Вашей совести.
Вам был предоставлен шанс не удариться в грязь лицом, Вы им не воспользовались
А вот здесь координаты

принадлежат совершенно другому пространству - трёхмерному, которое не имеет к пространству Минковского ни какого отношения
Отношение здесь самое прямое: Каждая точка этого трёхмерия должна соответствовать мировой линии четырёхмерия с теми же значениями тех же пространственых координат -- просто в силу способа вывода этой формулы метрики.
Вообще-то не линии, а точке: точка должна соответствовать точке, а дифференцируемых функций
$")
в общем случае нету. Так что точка точке соответствует, но "россыпью, гроздьями, фаршем".

$")




 = \frac{\ell v}{c^2} \frac{1}{\sqrt{1 - \frac{v^2}{c^2}}}, \quad
r(\ell) = \operatorname{const}, \quad
\theta(\ell) = \operatorname{const}, \quad
\varphi(\ell) = \frac{\ell}{r \sin(\theta)} \frac{1}{\sqrt{1 - \frac{v^2}{c^2}}}. \eqno(6)
$$")

 = \frac{s}{c} \frac{1}{\sqrt{1 - \frac{v^2}{c^2}}}, \quad
r(s) = \operatorname{const}, \quad
\theta(s) = \operatorname{const}, \quad
\varphi(s) = 2\pi + \frac{v s}{c \, r \sin(\theta)} \frac{1}{\sqrt{1 - \frac{v^2}{c^2}}}. \eqno(7)
$$")
}{\sqrt{1 - \frac{v^2}{c^2}}}, \quad
s = \frac{v}{c} \frac{2\pi r \sin(\theta)}{\sqrt{1 - \frac{v^2}{c^2}}}. \eqno(8)
$$")



 = 0$")


^2 \, (d\psi + \omega dt) }{\sqrt{1-\frac{\omega^2 r^2 \sin(\theta)^2}{c^2}}} = 0, \\
d\ell^2 = dr^2 + r^2 d\theta^2 + \frac{ r^2 \sin(\theta)^2 \, d\psi^2 }{1-\frac{\omega^2 r^2 \sin(\theta)^2}{c^2}}.
\end{cases}
$$")
^2 \, d\psi^2 }{1-\frac{\omega^2 r^2 \sin(\theta)^2}{c^2}}.
$$")




