Еще интересный момент для себя открыл. Если нам известно, что у вектора трехмерной скорости в искривленном пространстве только одна ненулевая компонента

, то это не значит, что модуль скорости будет ей равен, как этого ожидаешь в случае плоского пространства. Модуль будет равен

Это также и в плоском пространстве но просто в криволинейных координатах (уже в самой обычной классике). Например в цилиндрической системе отчета в плоском 3d (при нулевых

и

) правильное выражение для тангенциального элемента длины будет

а не

; для скорости также.
Тут бы лучше заменить букву в свертке. Не то чтобы выражение получается неправильное. Но ведь меняют же букву внутренней переменной интегрирования в интеграле, чтоб она не совпадала с чем не нужно.
Если принять правило чтобы всегда сперва разворачивать сумм по немых индексов (и уже потом подставлять конкретных величин для свободных индексов в оставшихся) то неопределенности не будет... но да наверное, лучше все-таки использовать другую.
-- 01.10.2024, 21:17 --Все же получилось, что скорость неподвижного в системе подвижного равна (с минусом) скорости подвижного в системе неподвижного. Так мне и казалось с самого начала. Потому, что движущийся со скоростью

касательно к ободу наблюдатель синхронизирует часы в локальной области так же точно, как и наблюдатель на ободе. Тогда задача сводится к двум инерциальным наблюдателям.
Во всяком случае "здравый разум" мне говорил, что в нулевом и в

пределе обе должны совпадать; так что странно было бы если получалось что-то другое (про "сводится к инерциальным наблюдателям" как-то не поворачивается язык, это не локально-инерциальные системы - и всякие собственные ускорения и приливные силы в соответных систем отсчета в общем случае, никуда не деваются).
Но, похоже, что в нестационарной метрике это не обязательно так.
А конкретный пример есть? (разумеется в локальной окрестности где проходят мимо друг друга) А то соображения про пределов такие же.

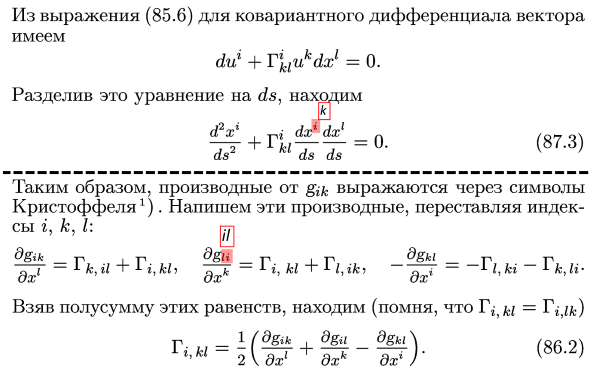
 , это явно опечатка. Немые индексы в знаменателе надо заменить на
, это явно опечатка. Немые индексы в знаменателе надо заменить на  , это же свёртка?
, это же свёртка?}$$")
 , можно вроде бы формально понять, как:
, можно вроде бы формально понять, как:}=\frac{c dr}{\sqrt{h}(dt-g_r dr)}$$")
 ,
,
 во вращающейся системе. Если нигде не напутал:
во вращающейся системе. Если нигде не напутал:/c^2} $$")
/c^2} $$")
 имеем случай в задаче.
имеем случай в задаче. ) относно ИСО.
) относно ИСО.  (покоится в СО1), и
(покоится в СО1), и  (покоится в СО2).
(покоится в СО2). объекта
объекта  объекта
объекта R$") . Но его линейная скорость во вращающейся системе совсем другая.
. Но его линейная скорость во вращающейся системе совсем другая.