Оптимальная стратегия обегания правильного многоугольника выглядит следующим образом.
Собственно, надо рассмотреть бег вдоль одной стороны.
Мы уже выяснили, что в любой точке траектории ускорение будет максимально возможным равным

Надо только определить оптимальное направление.
Наша задача - минимизировать время пробегания вдоль оси

, которая совпадает со стороной многоугольника, при условии известного изменения скорости вдоль оси

Направление скорости в углу нам известно. Пока неизвестна величина.
Зададим ее произвольно. А стратегию просто угадаем.
Логично предположить, что в направлении оси
Ускорение постоянно, а на середине отрезка просто меняет направление на противоположное.
А по оси
Тоже постоянно. И направлено к центру многоугольника. И таковым является на протяжении всего пробега вдоль отрезка.
Получаем два симметричных куска параболы, сшитые посередине.
Выпишем эти уравнения в следующих обозначениях:

- длина стороны многоугольника.

- модуль ускорения.

,

- ускорения вдоль осей

- скорость в углу

- угол вектора скорости относительно оси
1. Изменение скорости вдоль оси
Задается уравнением:
= a_yt$")
2. Формула равноускоренного движения вдоль оси
:
t + 0.5 a_xt^2$")
3. Ускорения:

Порядок подстановкой:
Из формулы 1. Подставляем время

в формулу 2, а из формулы 3. подставляем ускорение
туда же.
Получается однозначная функциональная связь скорости между скоростью в углу и ускорением по вертикали.
Теперь нам надо минимизировать время пробегания.
Это легче всего сделать выразив функционально время через ускорение по вертикали.
Для этого подставим найденную скорость в формулу 1.
И ищем минимум функции
$")
Остаётся доказать, что данная стратегия оптимальна.
Действительно, чтобы уменьшить время пробегания, нам надо на каком-то участке чуток увеличить ускорение по оси
. Но тогда на этом участке уменьшится ускорение по оси
. Но тогда время по оси
увеличится. Ввиду оптимальности стратегии пробегания вдоль этой оси при постоянном ускорении. Противоречие.


 .
. при фиксированном
при фиксированном  (здесь
(здесь  - модуль изменения скорости). Но как-то не увидел в первом интеграле координату "центра тяжести". А так всё красиво решалось бы.
- модуль изменения скорости). Но как-то не увидел в первом интеграле координату "центра тяжести". А так всё красиво решалось бы. и так-же эквиваленто
и так-же эквиваленто  (массе и длине маленького кусочка каната).
(массе и длине маленького кусочка каната).  будет в таком случаю аналогом координаты
будет в таком случаю аналогом координаты  переходит в интеграл
переходит в интеграл  . Поделив на фиксированную длину каната (или же фиксированная длина траектории в пространстве скоростей) получим как раз координату центра масс по оси
. Поделив на фиксированную длину каната (или же фиксированная длина траектории в пространстве скоростей) получим как раз координату центра масс по оси  которую надо максимизировать. Что равносильно минимизировать потенциальную энергию каната в поле тяжести.
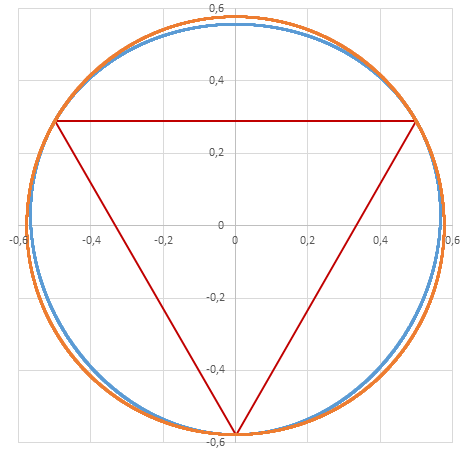
которую надо максимизировать. Что равносильно минимизировать потенциальную энергию каната в поле тяжести. что совпадает с тем что ускорение в вершине только нормальное, радиус кривизны совпадает с радиусом описанной окружности.
что совпадает с тем что ускорение в вершине только нормальное, радиус кривизны совпадает с радиусом описанной окружности. то получится время совпадающая с ускорением на половину длины отрезка и торможением на второй половине.
то получится время совпадающая с ускорением на половину длины отрезка и торможением на второй половине.
 . Расположим начало координат в одной из вершин с
. Расположим начало координат в одной из вершин с  вдоль стороны и
вдоль стороны и  по внешнему перпендикуляру и будем рассматривать движение на одной шестой периода (со временем
по внешнему перпендикуляру и будем рассматривать движение на одной шестой периода (со временем  ) от вершины до точки напротив середины стороны. Уравнения движения:
) от вершины до точки напротив середины стороны. Уравнения движения: =w\cos\vartheta(t/\tau), \ddot y(t)=w\sin\vartheta(t/\tau)$") ; ожидаем, что
; ожидаем, что  будет в четвертом квадранте, и нам известно, что
будет в четвертом квадранте, и нам известно, что =y(0)=0,\dot x(0)=\dfrac{v_0}2, \dot y(0)=\dfrac{\sqrt3}2v_0$") , а так же
, а так же =\dfrac{a}2,\dot y(\tau)=0$") . Проинтегрируем:
. Проинтегрируем:dsdp\\
0=\dfrac{\sqrt3}2v_0+w\tau\int\limits_0^1\sin\vartheta(p)dp\end{cases}$$") Введем
Введем =\int\limits_0^p\cos\vartheta (s)ds\Rightarrow\cos\vartheta(p)=f^\prime(p),\sin\vartheta(p)=-\sqrt{1-f^\prime(p)^2}$") и получим
и получим+\frac{1}{\sqrt3}\sqrt{1-f^\prime(p)^2}dp\equiv\int\limits_0^1L\left(f(p),f^\prime(p)\right)dp$$") Для определения неизвестной функции
Для определения неизвестной функции $") запишем необходимое условие экстремальности, уравнение Эйлера-Лагранжа:
запишем необходимое условие экстремальности, уравнение Эйлера-Лагранжа:=\sqrt3(p-1)$$") и дальше уж совсем дело техники - я просто находил явный вид
и дальше уж совсем дело техники - я просто находил явный вид =\dfrac{1}{\sqrt3}\left(2-\sqrt{3(1-p)^2+1}\right)$") и брал интеграл
и брал интеграл и значит
и значит  . Но скорость в вершине (а, значит, и радиус кривизны) для оптимальной траектории не такие: из уравнений движения
. Но скорость в вершине (а, значит, и радиус кривизны) для оптимальной траектории не такие: из уравнений движения dp$") и
и }{2\sqrt3+\ln(2+\sqrt3)}\mu g a\approx0,4837\mu g a$") , несколько меньше; в этой же пропорции меньше и радиус кривизны траектории в вершине.
, несколько меньше; в этой же пропорции меньше и радиус кривизны траектории в вершине. конечно
конечно}{a_y}$")

}{\sin(\alpha)}+0.5\sqrt{a^2-a_y^2}\frac{v^2}{a_y^2\sin^2(\alpha)}$")

 из 3.
из 3.}{a_y\sin(2\alpha)+\sqrt{a^2-a_y^2}}$")
}{\sqrt{1+\sin^2(2\alpha)}}$") . И тогда
. И тогда }}$")
![$t=\sqrt{\frac{2b}{a}}\frac{\sin^2(\alpha)}{\sqrt[4]{1+\sin^2(2\alpha)}}$](https://dxdy-04.korotkov.co.uk/f/7/8/b/78b9ce719f8b5d5af669fe421f0603d482.png "$t=\sqrt{\frac{2b}{a}}\frac{\sin^2(\alpha)}{\sqrt[4]{1+\sin^2(2\alpha)}}$")
 и в старых обозначениях получаем
и в старых обозначениях получаем ![$t=\sqrt{\frac{a}{\mu g}}\frac{2n\sin^2(\frac{\pi}{n})}{\sqrt[4]{1+\sin^2(\frac{2\pi}{n})}}$](https://dxdy-04.korotkov.co.uk/f/3/b/2/3b2f804350416b711482fde2184a48b282.png "$t=\sqrt{\frac{a}{\mu g}}\frac{2n\sin^2(\frac{\pi}{n})}{\sqrt[4]{1+\sin^2(\frac{2\pi}{n})}}$")

 (тоже "свободное падение" на сторону треугольника, но "поле тяжести" не перпендикулярно стороне): множитель
(тоже "свободное падение" на сторону треугольника, но "поле тяжести" не перпендикулярно стороне): множитель ^{1/4}\approx4.8546$")
![$\frac{9}{\sqrt2\sqrt[4]7}\approx3,9125$](https://dxdy-01.korotkov.co.uk/f/c/6/4/c646787891c89c5dc3594c2d65a4a83e82.png "$\frac{9}{\sqrt2\sqrt[4]7}\approx3,9125$") ?
?