Напоминания о смысле термина "поле":
Волновая функция (в одночастичной квантовой механике)
$")
и потенциальная энергия
$")
- эти функции служат примерами
скалярного поля. В физике термин "поле" означает функцию, аргументами которой являются координаты произвольной точки в пространстве. При этом слово "скалярное" означает, что значением такой функции в каждой точке является число (именно одно число, в общем случае комплексное, но не совокупность нескольких чисел).
Векторное поле $")
- функция координат точки, значением которой в каждой точке является не одно число, а вектор

В общем случае в разных точках эти векторы различаются, и по величине, и по направлению.
Термин "вектор"

когда он применяется вне связи со словом "поле", означает, что мы рассматриваем одиночный вектор. В таком контексте не важно, есть ли у вектора "адрес прописки" в какой-либо точке пространства или нет, или это однородное векторное поле - такое, что во всех точках пространства вектор

один и тот же. Дело в том, что вектор количественно описывается своими тремя
компонентами - проекциями

(где
$")
на декартовы координатные оси, а проекции вектора не изменяются при параллельном переносе вектора (по правилам обычной евклидовой геометрии). Поэтому и не играет роли, в какой точке нарисовать одиночный вектор, заданный своими проекциями.
(Другое дело - рассматривать векторное поле, не являющееся константой (неоднородное поле), т.е. когда в разных точках векторы разные. В случае векторного поля интерес представляет целиком вся его кофигурация - картина во всём пространстве.)
Термин "вектор" означает также, что по определению при повороте компоненты вектора преобразуются по такому же линейному закону, по которому преобразуются компоненты радиус-вектора какой-нибудь точки в общем положении.
Например, возьмём кирпич и предположим, будто его длина, ширина и высота это компоненты вектора. Повернём кирпич; так, и сяк, и по-всякому. А его длина, ширина и высота не изменяются. Значит, это не компоненты вектора. Другой пример: вообразим плоский заряженный конденсатор, такой большой, что электрическое поле

внутри него в рассматриваемой большой области пространства можно считать однородным. Понятно, что при поворотах этого конденсатора вместе с ним поворачивается и это поле
в нём, как и полагается вектору.
В задачах физики встречаются также не скалярные и не векторные поля. Тензорное поле - это тензорнозначная функция координат точки; значением такой функции является совокупность компонент тензора (компоненты тензора преобразуются при поворотах как произведения компонент вектора). Спинорное поле - спинорнозначная функция координат точки. В случае с

спинор представляется двумя комплексными компонентами, которые при поворотах подчиняются некоторому специальному линейному закону преобразования, отличному от уже перечисленных.
Ниже я на частных примерах с картинками поясняю, как математически описывается сначала поворот скалярного поля, а затем и поворот векторного поля.
Для примера пусть речь идёт о повороте полевой конфигурации вокруг оси

против часовой стрелки на угол

Ось
перпендикулярна плоскости рисунка, она "смотрит на нас". Рассматриваем значения поля в точках с

т.е. на плоскости

это плоскость рисунка. Чтобы "увидеть" скалярное поле, просим компьютер покрасить серым цветом точки пространства, в которых значение скалярного поля равно нулю. А там, где величина поля положительная, пусть цвет будет белым: чем больше значение полевой функции, тем белее в этом месте рисунок. И наоборот: отрицательные значения поля изображаются почернением.
Приведённый ниже рисунок показывает, что повёрнутая полевая функция даётся формулой исходной функции, в которой аргументы

заменены их линейными комбинациями по формулам
обратного поворота радиус-вектора:
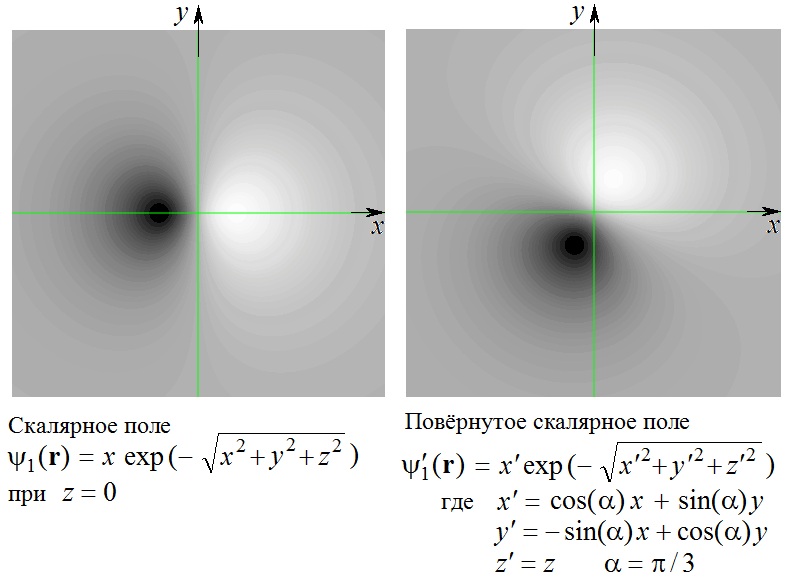
Формулы, по которым компьютер построил эти изображения, приведены там же на рисунке. В общем виде замену аргументов, которой описывается поворот числовых значений функции, т.е. перенос значений функции со старого места на новое, можно представить вот как. Символ радиус-вектора

обозначает совокупность переменных

Символ

обозначает поворот (в данном примере это поворот вокруг оси
против часовой стрелки на угол

). Тогда

обозначает совокупность линейных комбинаций переменных

соответствующую обратному повороту радиус-вектора, т.е. повороту на угол
.$")
Например, если
$")
это скалярное поле до поворота, то функция
$")
описывает скалярное поле после поворота, обозначенного символом

Можно рассматривать сколько угодно полей, одновременно заданных в пространстве. Например, три функции с числовыми значениями
,$")
,$")
$")
описывают три скалярных поля. Для вычисления повёрнутой конфигурации этих трёх полей надо в каждой из этих функций преобразовать указанным образом аргументы. Т.е., повёрнутые поля описываются функциями
,$")
,$")
.$")
Аналогично рассмотрим поворот векторного поля.
Например, те же три функции
,$")
которые в одной задаче играют роль скалярных полей, в другой задаче могут выступать в роли компонент
,$")
,$")
$")
векторного поля
.$")
Ясно, что про любую точку
можно сказать, что поле в ней после поворота определяется значениями компонент, которые перенеслись в неё из точки

Но как именно определяется? Вот как: надо из функций
,$")
,$")
$")
составить линейные комбинации по формулам поворота вектора. Т.е. повёрнутое поле
$")
вычисляется так:
=\hat{R}\mathbf{A}(\hat{R}^{-1}\mathbf{r})$$")
Это поясняет схематический рисунок, на нём векторы поля изображены для простоты лишь в четырёх точках пространства; в остальных точках векторы поля можно дорисовать мысленно. Один из векторов - красного цвета, чтобы нам было легче проследить, откуда и куда он перенёсся, и как при этом повернулся:
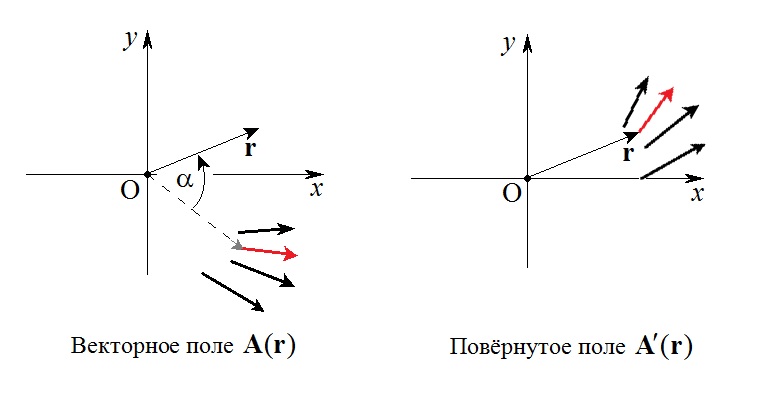
Видно, что в точку с радиус-вектором
(и аналогичные слова можно будет сказать про любую точку) вследствие поворота пришёл вектор поля из точки
Радиус-вектор этой точки показан пунктиром в левой части рисунка, где изображено ещё неповёрнутое поле. Причём, видно, что пришедший в точку
вектор поля испытал поворот
Нетрудно также заметить, что обе операции коммутативны друг с другом: можно поменять порядок действий - сначала в каждой точке повернуть имеющийся в ней вектор поля (т.е. по формуле
$")
составить линейные комбинации из компонент векторов поля), а затем параллельно перенести их на новое место, т.е. заменить аргумент
в функциях, описывающих компоненты поля, на
Замену аргумента
на
называем орбитальным преобразованием. Оно по определению векторного оператора орбитального момента

символически представляется действием оператора

на полевые функции, для любых скалярных полей:
=e^{-i\,\pmb{\alpha}\cdot \hat{\mathbf{l}}} \psi_a(\mathbf{r}) $$")
и для компонент любого векторного поля:
=e^{-i\,\pmb{\alpha}\cdot \hat{\mathbf{l}}} A_a(\mathbf{r}) $$")
Поворот любого вектора
т.е. просто составление линейных комбинаций из его компонент, условились называть спиновым преобразованием для спина

Оно по определению векторного оператора спинового момента

символически представляется действием оператора


Поворот векторного
поля, т.е. поворот не одиночного вектора, а поворот всей полевой конфигурации целиком, как пояснялось на рисунке выше, это резульат совместного действия обоих преобразований - орбитального и спинового. Т.е., если обозначать повёрнутое поле штрихом, то по определению операторов спинового и орбитального моментов повёрнутое векторное поле
выражается через неповёрнутое поле
$")
равенством:
=e^{-i\,\pmb{\alpha}\cdot\hat{\mathbf{s}}}\,e^{-i\, \pmb{\alpha}\cdot\hat{\mathbf{l}}}\, \mathbf{A}(\mathbf{r})$$")
Спин скалярного поля равен нулю; поворот скалярного поля это только орбитальное преобразование:
= e^{-i\, \pmb{\alpha}\cdot\hat{\mathbf{l}}}\, \psi(\mathbf{r})$$")
Все эти равенства с операторными экспонентами можно понимать в смысле рядов по степеням угла поворота

Они нужны, главным образом, для получения явных выражений операторов, указанных в показателях экспонент, путём рассмотрения инфинитезимальных преобразований - в первом порядке по
После того как интересующие операторы найдены, можно проверять, что равенства справедливы и в более высоких порядках (для "достаточно хороших" полевых функций).
Надо чётко различать, о каком представлении поворотов идёт речь - просто на векторе или на векторном поле; и, соответственно различать, что такое
В случае векторного поля поворот состоит не только из спинового преобразования с
а ещё и из орбитального преобразования. Векторное поле можно характеризовать спином
Т.е. при
Как это выводится, я уже пояснял. И картина-то этого поля ведь очень наглядная: ёжик свернулся в шарик, иголки торчат радиально во все стороны, при поворотах такого игольчатого шарика (вокруг осей, проходящих через центр шарика) картина не меняется. Так и это векторное поле - оно инвариантно к поворотам. А это означает, что совместное действие орбитального и спинового преобразований сводится для этого поля к тождественному преобразованию, т.е. суммарный момент равен нулю.
Так векторную формулу не пишут, и это не векторная функция. Это похоже на тензор второго ранга с девятью компонентами. Можно понять этот Ваш пример следующим образом (и тогда это будет для Вас учебная задача). Пусть
есть заданный вектор, не зависящий от координат точек в пространстве. Он характеризуется спином
и орбитальным моментом ноль. И есть три скалярных поля
У скалярных полей спин ноль; причём, у этих скалярных полей орбитальный момент единица - как у похожих на них хорошо известных p-функций в квантовой механике. Из всех этих заготовок составляем три векторных поля:
компонент, преобразующихся друг через друга при поворотах. Это приводимое представление. Его можно разложить по шаровым векторам
По правилу сложения моментов ожидаемые в этой задаче значения полного момента есть
войдут в ответ.



^k\langle\psi + i^k \varphi|\hat{A}| \psi + i^k \varphi\rangle = \langle\psi|\hat{A}| \varphi\rangle$")
\ne0$")


 = A_a(\mathbf{r})- (\pmb{\alpha}\times\mathbf{r})\cdot\nabla A_a(\mathbf{r})=A_a(\mathbf{r}) - \pmb{\alpha}\cdot(\mathbf{r}\times\nabla)A_a(\mathbf{r})$$")
\,A_a(\mathbf{r}) = A_a(\mathbf{r})-i\,\pmb{\alpha}\cdot\hat{\mathbf{l}}\,A_a(\mathbf{r}) $$")

$")



$")
,$")

$$")
$$")
$$")
$")

.$")
=0.$")



\,\mathbf{a}=0$$")
$")



,$")
$")


$")








,$")
,$")
,$")
\mathbf{a}=0$")
,$")


![$$\hat{\mathbf{l}}=(-i)[\mathbf{r}\times\nabla]$$](https://dxdy.ru/math/895c676ac0aa1ecc540b7d9f1f2dff2782.png "$$\hat{\mathbf{l}}=(-i)[\mathbf{r}\times\nabla]$$")






![$$\hat{l}_a=(-i)[\mathbf{r}\times\nabla]_a = -i\,e_{abc}\,x_b\,\frac{\partial}{\partial x_c}$$](https://dxdy.ru/math/dd642ea8fbbabdae09880f8cff66b93e82.png "$$\hat{l}_a=(-i)[\mathbf{r}\times\nabla]_a = -i\,e_{abc}\,x_b\,\frac{\partial}{\partial x_c}$$")
\left(y\frac{\partial}{\partial z}-z\frac{\partial}{\partial y}\right)$$")
\left(z\frac{\partial}{\partial x}-x\frac{\partial}{\partial z}\right)$$")
\left(x\frac{\partial}{\partial y}-y\frac{\partial}{\partial x}\right)$$")

$")
$")

_{k'k}=\langle \psi_{k'}|\hat{l}_a|\psi_k\rangle$$")

 =\sum_{k'=1}^{2l+1}(l_a)_{k'k}\,\psi_{k'}(x,y,z)$$")
=\sum_{k=1}^{2l+1}C_k\,\psi_k(x,y,z)$$")
_{k'k}\,\psi_k'=\sum_{k'}\left(\sum_k (l_a)_{k'k}\,C_k\right)\psi_{k'}$$")
_{k'k}$")




\times(2l+1)$")

$")








r_xt_x=i(r_yt_x-r_xt_y)\ne0.$$")











$")


=x, \quad \psi_2(\mathbf{r})=y, \quad \psi_3(\mathbf{r})=z $$")




|^{2}= A_{a}^{T}(\mathbf{r})e^{i\,\pmb{\alpha}\cdot \hat{\mathbf{l}}} e^{-i\,\pmb{\alpha}\cdot \hat{\mathbf{l}}} A_a(\mathbf{r})=|A_a(\mathbf{r})|^{2}$$")


$")
\,|^2 \,=\, \left(e^{-i\,\pmb{\alpha}\cdot \hat{\mathbf{l}}} A_x(\mathbf{r})\right)^*\,e^{-i\,\pmb{\alpha}\cdot \hat{\mathbf{l}}} A_x(\mathbf{r})$$")



$")

$")
=e^{-ia\hat{X}}$$")

$")

=1-ia\hat{X}$$")


,$")


=e^{i\,\mathbf{a}\cdot\hat{\mathbf{p}}}\,\psi(\mathbf{r})$$")



=x$$")

=\cos(\alpha)\,x+\sin(\alpha)\,y $$")

\,=\,\left(1+(-i\alpha\hat{l}_z)+\frac{1}{2!}(-i\alpha\hat{l}_z)^2+\frac{1}{3!}(-i\alpha\hat{l}_z)^3\,+\,...\right)\,\psi_1(x,y,z)\,$$")
x,$")
^2x,$")
^3x.$")
^n$")





=\mathbf{r},$")

,$")