Долго думал как изобразить это творение, но так до меня и не дошло.
Возниколо несколько вопросов по моделированию "руки"
Цитата:
Для какой цели этот манипулятор нужен?
чтобы превратить кисть в металлический крюк из 5 тросов и напёрстков.
Цитата:
Если поднимать тяжелые веса, то он должен быть достаточно прочным, можно пожертвовать пластичностью и сделать его дву-трех палым.
Трёх палым не обязательно, пятерня тоже сойдёт. Прочности будет как у 5-ти металлических крючьев на пяти тросиках. Короче дофига.
Цитата:
Если же пылинки с пола поднимать и мягкие игрушки, нежно, то наверно 5-ти палым и стоит пожертвовать прочностью.
Само собой, но при малых габаритах трёхпалость не обязательна, так как вес будет не таким уж и большим.
Цитата:
насколько помню у американского халка на этот случай были крюки - это ваабще шоб без заморочек:)
Там даже не крюки толком а две фиговины круглой формы (я их сначала за присоски принял как не печально) они поцеплены к экзу через ремни. Это блин миниподъёмныйкран такой получился.
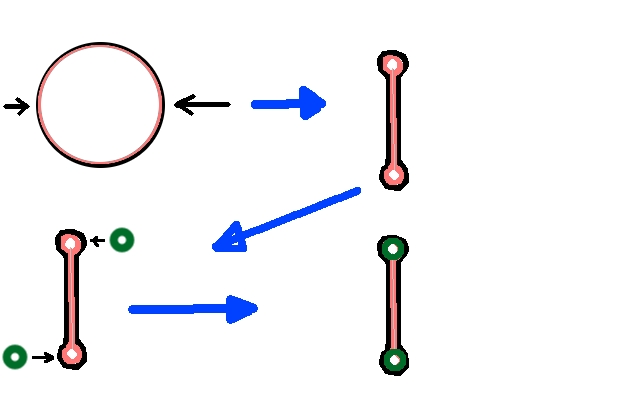
И ещё раз обрисую что я имел в виду. смотри на предплечье. Узри на пол предплечья от локтя гидроцилиндр с кольцом на конце. Теперь представь тросик с двумя петлями на концах. Одна петля цепляется за цилиндр, аторая за напёрсток в пол пальца длинной на уровне среднего сустава. средний - это второй от лучезапястного сустава или от ногтя.
-- 20.06.2012, 15:27 --Для какой цели этот манипулятор нужен?
ну если манипулятор имеется в виду как управляемое и от руки отдельное, то такой манипулятор даст возможность контролировать движение пальцев манипулятора движением пальцев руки синхронно и без датчиков нервно мышечной активности. Эти тросы с кольцами смогут оказать сопротивление и давление на пальцы руки зависимые от давления и сопротивления чегото пальцам манипулятора. Пылинки не соберёш но камень подымеш.
Тобиш такая фича получится что ты будеш чувствовать пальцами живыми нагрузку на пальцы механические пусть и в меньшем объёме методом обратной связи. Тоесть полнейшая синхронизация без высоких технологий акрома регулировки усилия.
-- 20.06.2012, 15:43 --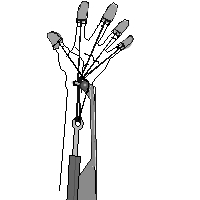
Вот собственно и ладошка мною описанная в начале