Если Вы про систему линейных однородных уравнений, то требование её разрешимости -- это равенство определителя нулю
Это понятно, я про вот это:
Думаю, что все крепления жёсткие, а углы стержней с осями вращения, по-хорошему, должны быть даны. Считайте, что они равны

.
Я использую вместо этих углов углы между вертикалью и стержнями, и обозначаю их

и

. Я так понимаю, что они не должны меняться со временем и они параметры.
При изучении динамики, они уже функции времени
Углы отклонения в плоскости колебаний у меня были как

. Они меняются со временем. Вопрос в том, в ответе имеется ввиду под
и
то что имею ввиду я, или так обозначены
. Если второе, то как мне тогда найти какие изначальные углы отклонения по вертикали у каждого маятника.
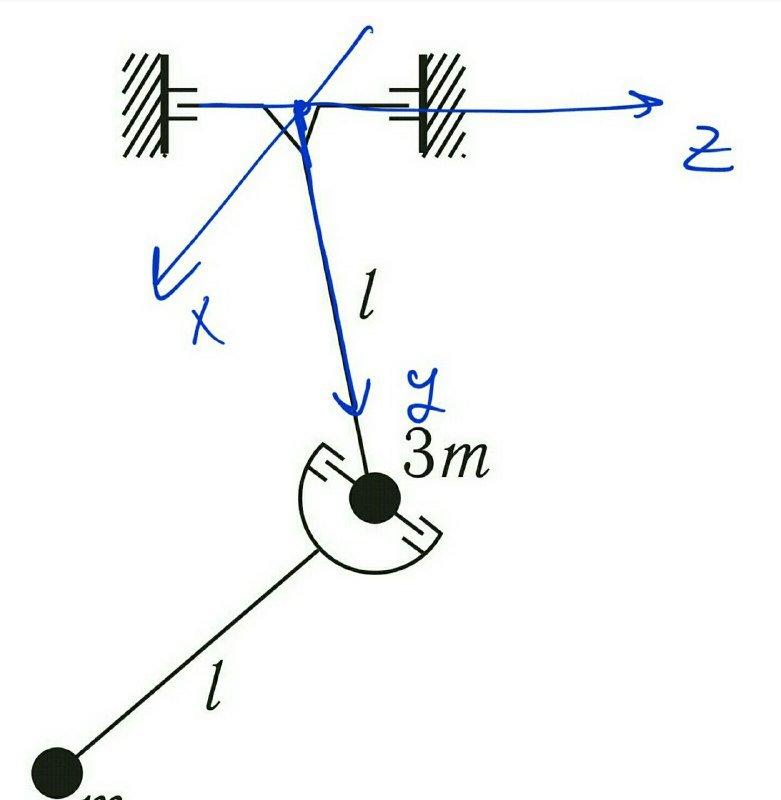
Ось

на рисунке drzewo это ось вращения массы m. То есть, Вы сначала поворачиваете массу 3m относительно её оси, а затем всю систему относительно оси вращения массы m, на рисунке это
.
Тут я окончательно запутался

. Верхний маленький стержень, который горизонтален, вдоль которого ось Oy, это вроде ось вращения массы 3m. Так как масса m с ним связана, то можно считать что масса m тоже может вращаться по этой оси. Чисто для массы m ось вращения это второй маленький стержень.
Похоже я до сих пор не понял кинематику задачи, поэтому уточню ее так:
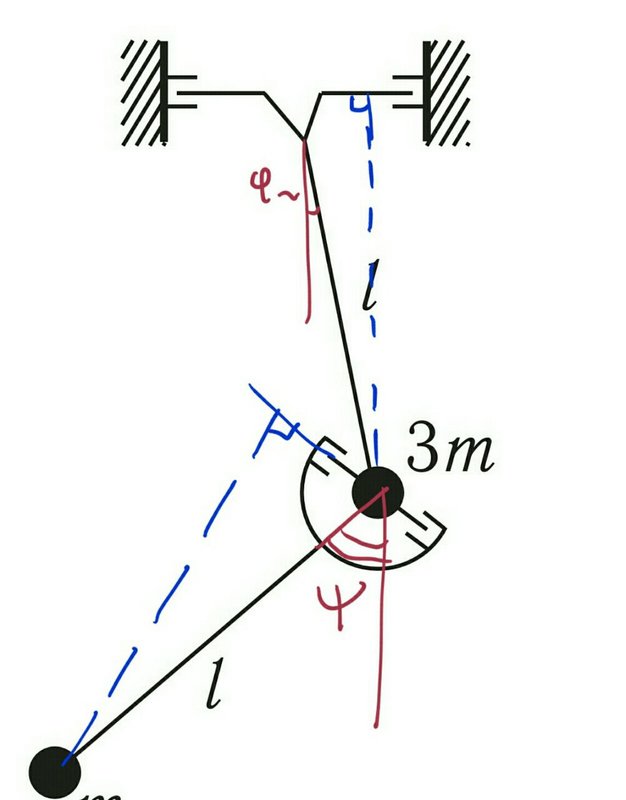
Синим я обозначил пересечение плоскости рисунка с плоскостями вращения шаров. Если я правильно понимаю, это есть те образующие конуса о которых Вы говорили.
Бардовый (это же бардовый ?) цвет обозначает вертикаль, и угол между вертикалью и большими стрежнями.


 в предложенной им подвижной системе координат, а затем, осуществить поворот декартовой системы на угол
в предложенной им подвижной системе координат, а затем, осуществить поворот декартовой системы на угол  относительно оси
относительно оси  . Так можно получить координаты отклонённого маятника в неподвижной системе. Вашим способом тоже можно дойти до правильного лагранжиана, но больше шансов допустить ошибку.
. Так можно получить координаты отклонённого маятника в неподвижной системе. Вашим способом тоже можно дойти до правильного лагранжиана, но больше шансов допустить ошибку.  , а соответствующие собственные вектора задают условия на углы, при которых эти частоты реализуются. В принципе, у этой задачи есть и рукомахательное решение, если понять чем можно пренебрегать, и попутно раскладывая тригонометрию в ряд до нужного порядка.
, а соответствующие собственные вектора задают условия на углы, при которых эти частоты реализуются. В принципе, у этой задачи есть и рукомахательное решение, если понять чем можно пренебрегать, и попутно раскладывая тригонометрию в ряд до нужного порядка. от вертикали и угол отклонения звена
от вертикали и угол отклонения звена  от плоскости
от плоскости  .
.  расписываем радиус-векторы материальных точек. Для получения скоростей дифференцируем эти радиус-векторы по времени, используя для производных базисных векторов формулы Пуассона.
расписываем радиус-векторы материальных точек. Для получения скоростей дифференцируем эти радиус-векторы по времени, используя для производных базисных векторов формулы Пуассона. по системе
по системе  равна
равна $")





}{2} + \frac{m(\dot{x_2}^2 + \dot{y_2}^2 + \dot{z_2}^2 )}{2} + 3mgy_1 + mgy_2$")
\dot{\varphi}^2 }{2} + \frac{ml^2(( \dot{\varphi} \cos \varphi + \dot{\psi}\cos \psi)^2 + (\dot{\varphi} \sin \varphi + \dot{\psi} \sin \psi \cos \beta)^2 + ( \dot{\psi} \sin \psi \sin \beta)^2 )}{2} $")


}{2} + $")

\dot{\varphi}^2 + (\cos^2 \psi + \sin^2 \psi \cos^2 \beta + \sin^2 \psi \sin ^2\beta )\dot{\psi}^2+ 2 (\cos \varphi \cos \psi + \sin \varphi \sin \psi \cos \beta)\dot{\varphi}\dot{\psi} )}{2} + $")

\dot{\psi}^2}{2}
+ml^2 (\cos \varphi \cos \psi + \sin \varphi \sin \psi \cos \beta)\dot{\varphi}\dot{\psi} $")

\dot{\varphi}\dot{\psi} $")






 &- l\omega^2 \\
- l\omega^2 & g \cos \beta -l\omega^2
\end{bmatrix} = 4(g -l{\omega^2})(g \cos \beta -l\omega^2 ) - l^2 \omega^4 = 3 l^2 \omega^4 - 4gl(\cos \beta + 1)\omega^2+4g^2 \cos \beta$$")


 . И при этом продолжаете гнуть свое:
. И при этом продолжаете гнуть свое: