Куда будет направлено тангенциальное ускорение в таком случае? А куда направлен

у вас на рисунке? Вот исходя из этого и получится, что знаки

и

противоположны.
Так то понятно, что физически увеличение угла вправо (как на рисунке) соответствует противоположному (справа налево) направлению
. Я не могу понять, как но настоящему определено математически
. Я думал, что это модуль вектора
- величина строго неотрицательная, а оказывается это просто скаляр, как сила тока в законах Кирхгофа, которая может принимать и отрицательные значения. Покуда мне не будет полностью понятна строгая математическая модель происходящего, я не буду считать понятным уравнение
- оно должно быть выведено исключительно математически.
Очень полезные формулы.
Не помешает посмотреть и поупражняться с формулами Френе и репером Френе-Серре.
За это благодарен. Надеюсь именно эти формулы и направлены на то, чтобы описать математическую составляющую задачи, приводящей к результату

строгим путем. Завтра с утречка разберусь со всем этим.




 меняет модуль скорости маятника. Однако в результате таких операций я получаю уравнение
меняет модуль скорости маятника. Однако в результате таких операций я получаю уравнение 
 , а не
, а не  - не ясно.
- не ясно. 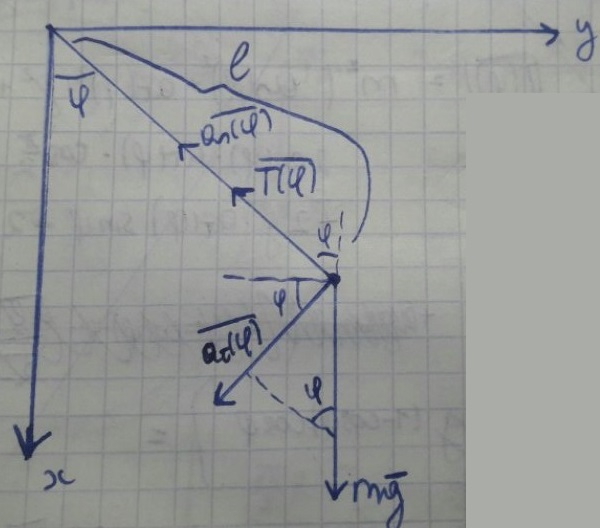

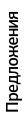
![$$\[\begin{gathered}
{O_x}{\text{:}}mg - T\cos \varphi = - m{a_n}\cos \varphi + m{a_\tau }\sin \varphi \hfill \\
{O_x}{\text{:}} - T\sin \varphi = - m{a_n}\sin \varphi - m{a_\tau }\cos \varphi \hfill \\
\end{gathered} \]$$](https://dxdy-04.korotkov.co.uk/f/3/2/8/32880341884fb6eb36e4d05321a5c56482.png "$$\[\begin{gathered}
{O_x}{\text{:}}mg - T\cos \varphi = - m{a_n}\cos \varphi + m{a_\tau }\sin \varphi \hfill \\
{O_x}{\text{:}} - T\sin \varphi = - m{a_n}\sin \varphi - m{a_\tau }\cos \varphi \hfill \\
\end{gathered} \]$$")
![$$\[\left\{ \begin{gathered}
T = m{a_n} + m{a_\tau }\cot \varphi \hfill \\
T - \frac{{mg}}{{\cos \varphi }} = m{a_n} - m{a_\tau }\tan \varphi \hfill \\
\end{gathered} \right.\]$$](https://dxdy-03.korotkov.co.uk/f/e/f/7/ef753457e2c804113bc9775da0ad327982.png "$$\[\left\{ \begin{gathered}
T = m{a_n} + m{a_\tau }\cot \varphi \hfill \\
T - \frac{{mg}}{{\cos \varphi }} = m{a_n} - m{a_\tau }\tan \varphi \hfill \\
\end{gathered} \right.\]$$")
![$\[{a_n} = {{\dot \varphi }^2}l,{a_\tau } = \ddot \varphi l\]$](https://dxdy-01.korotkov.co.uk/f/c/c/5/cc5b8a5d1a4bb4aec6c7d64e774de68482.png "$\[{a_n} = {{\dot \varphi }^2}l,{a_\tau } = \ddot \varphi l\]$") , имеем:
, имеем:![$$\[\ddot \varphi = \frac{g}{l}\sin \varphi \]$$](https://dxdy-03.korotkov.co.uk/f/e/6/a/e6aa3d435b40d56ab0b0d1a18e5d375182.png "$$\[\ddot \varphi = \frac{g}{l}\sin \varphi \]$$")
 противоположны, должно быть
противоположны, должно быть 
![$\[\ddot \varphi l = \left| {\ddot \varphi } \right|l\]$](https://dxdy-01.korotkov.co.uk/f/4/2/2/422cd8a06e8aa473581a7fdd6379610182.png "$\[\ddot \varphi l = \left| {\ddot \varphi } \right|l\]$") , то есть это величина заведомо положительная. Ну а направление есть у проекции
, то есть это величина заведомо положительная. Ну а направление есть у проекции ![$\[\overline {{a_\tau }} \]$](https://dxdy-04.korotkov.co.uk/f/f/4/8/f48f655d2af3289fd9062ebb543dcff482.png "$\[\overline {{a_\tau }} \]$") , которая уже входит модуль
, которая уже входит модуль 
 как указано на рисунке, и допустим, что этот угол увеличивается, ускоряясь (или ускоряется с нулевой начальной скорости). Куда будет направлено тангенциальное ускорение в таком случае? А куда направлен
как указано на рисунке, и допустим, что этот угол увеличивается, ускоряясь (или ускоряется с нулевой начальной скорости). Куда будет направлено тангенциальное ускорение в таком случае? А куда направлен 

 с полярными координатами
с полярными координатами  и
и  есть:
есть: и
и 
 и
и 




^2+\vec{e_\varphi}\,\ddot\varphi$")
^2-\vec{e_\rho}\,\ddot\varphi$")

^2)\vec{e_\rho}+\frac{1}{\rho}\frac{d(\rho^2\dot\varphi)}{dt}\vec{e_\varphi}$")
 в которых вы путаетесь, а честно посчитать
в которых вы путаетесь, а честно посчитать  и выразить их через
и выразить их через  Уравнение маятника полу́чите. Всё равно вы его решать не умеете, так что непонятно, зачем.
Уравнение маятника полу́чите. Всё равно вы его решать не умеете, так что непонятно, зачем.![$\[\mathop {\overrightarrow {{R_M}} }\limits^{..} \]$](https://dxdy-02.korotkov.co.uk/f/d/e/a/deaaae0e6f70f8a75b111f437f6db06782.png "$\[\mathop {\overrightarrow {{R_M}} }\limits^{..} \]$") получается результат, противоположный ожидаемому. Распишем
получается результат, противоположный ожидаемому. Распишем ![$$\[\mathop {\overrightarrow {{R_M}} }\limits^{..} = (\ddot \rho - \rho {(\dot \varphi )^2})\overrightarrow {{e_\rho }} + \frac{1}{\rho }\frac{{d({\rho ^2}\dot \varphi )}}{{dt}}\overrightarrow {{e_\varphi }} = (\ddot \rho - \rho {(\dot \varphi )^2})\overrightarrow {{e_\rho }} + \left( {2\dot \rho \dot \varphi + \rho \ddot \varphi } \right)\overrightarrow {{e_\varphi }} \]$$](https://dxdy-04.korotkov.co.uk/f/3/5/c/35c475e5110bb20a61854a4b639fad6982.png "$$\[\mathop {\overrightarrow {{R_M}} }\limits^{..} = (\ddot \rho - \rho {(\dot \varphi )^2})\overrightarrow {{e_\rho }} + \frac{1}{\rho }\frac{{d({\rho ^2}\dot \varphi )}}{{dt}}\overrightarrow {{e_\varphi }} = (\ddot \rho - \rho {(\dot \varphi )^2})\overrightarrow {{e_\rho }} + \left( {2\dot \rho \dot \varphi + \rho \ddot \varphi } \right)\overrightarrow {{e_\varphi }} \]$$")
![$\[\rho = l = \operatorname{const} \]$](https://dxdy-03.korotkov.co.uk/f/e/6/d/e6db3b83a670f631fb1a56ff5642954b82.png "$\[\rho = l = \operatorname{const} \]$") , так что
, так что ![$$\[\overrightarrow a = \mathop {\overrightarrow {{R_M}} }\limits^{..} = - l{(\dot \varphi )^2}\overrightarrow {{e_\rho }} + l\ddot \varphi \overrightarrow {{e_\varphi }} = {a_n}\overrightarrow {{e_\rho }} + {a_\tau }\overrightarrow {{e_\varphi }} \]$$](https://dxdy-04.korotkov.co.uk/f/f/c/5/fc508cf80db1f0059fd5947d66515ba782.png "$$\[\overrightarrow a = \mathop {\overrightarrow {{R_M}} }\limits^{..} = - l{(\dot \varphi )^2}\overrightarrow {{e_\rho }} + l\ddot \varphi \overrightarrow {{e_\varphi }} = {a_n}\overrightarrow {{e_\rho }} + {a_\tau }\overrightarrow {{e_\varphi }} \]$$")
 , но не для
, но не для ![$\[{a_\tau }\]$](https://dxdy-02.korotkov.co.uk/f/9/7/5/975a04c0d6b80184d535204fccc2873882.png "$\[{a_\tau }\]$") .
. ![$$\[\overrightarrow a = - \mathop {\overrightarrow {{R_M}} }\limits^{..} \]$$](https://dxdy-01.korotkov.co.uk/f/c/6/b/c6b11d447d2323c268e7b4fa5405887682.png "$$\[\overrightarrow a = - \mathop {\overrightarrow {{R_M}} }\limits^{..} \]$$")
 ? Как его получить из ваших формул, ведь оттуда выходит знак "
? Как его получить из ваших формул, ведь оттуда выходит знак " которого вы
которого вы