Куда будет направлено тангенциальное ускорение в таком случае? А куда направлен

у вас на рисунке? Вот исходя из этого и получится, что знаки

и

противоположны.
Так то понятно, что физически увеличение угла вправо (как на рисунке) соответствует противоположному (справа налево) направлению
. Я не могу понять, как но настоящему определено математически
. Я думал, что это модуль вектора
- величина строго неотрицательная, а оказывается это просто скаляр, как сила тока в законах Кирхгофа, которая может принимать и отрицательные значения. Покуда мне не будет полностью понятна строгая математическая модель происходящего, я не буду считать понятным уравнение
- оно должно быть выведено исключительно математически.
Очень полезные формулы.
Не помешает посмотреть и поупражняться с формулами Френе и репером Френе-Серре.
За это благодарен. Надеюсь именно эти формулы и направлены на то, чтобы описать математическую составляющую задачи, приводящей к результату

строгим путем. Завтра с утречка разберусь со всем этим.





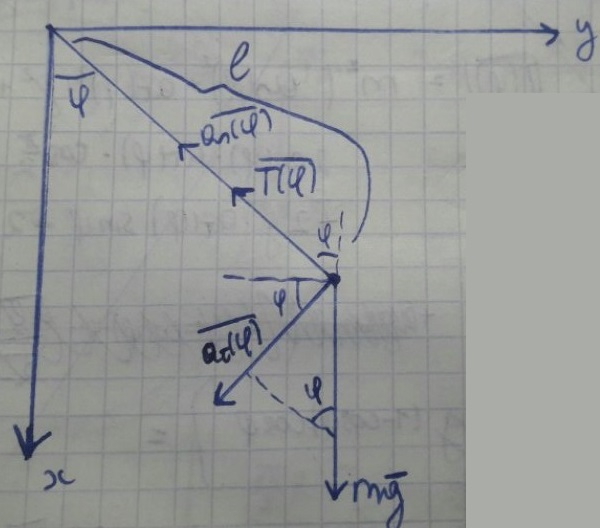

![$$\[\begin{gathered}
{O_x}{\text{:}}mg - T\cos \varphi = - m{a_n}\cos \varphi + m{a_\tau }\sin \varphi \hfill \\
{O_x}{\text{:}} - T\sin \varphi = - m{a_n}\sin \varphi - m{a_\tau }\cos \varphi \hfill \\
\end{gathered} \]$$](https://dxdy.ru/math/32880341884fb6eb36e4d05321a5c56482.png "$$\[\begin{gathered}
{O_x}{\text{:}}mg - T\cos \varphi = - m{a_n}\cos \varphi + m{a_\tau }\sin \varphi \hfill \\
{O_x}{\text{:}} - T\sin \varphi = - m{a_n}\sin \varphi - m{a_\tau }\cos \varphi \hfill \\
\end{gathered} \]$$")
![$$\[\left\{ \begin{gathered}
T = m{a_n} + m{a_\tau }\cot \varphi \hfill \\
T - \frac{{mg}}{{\cos \varphi }} = m{a_n} - m{a_\tau }\tan \varphi \hfill \\
\end{gathered} \right.\]$$](https://dxdy.ru/math/ef753457e2c804113bc9775da0ad327982.png "$$\[\left\{ \begin{gathered}
T = m{a_n} + m{a_\tau }\cot \varphi \hfill \\
T - \frac{{mg}}{{\cos \varphi }} = m{a_n} - m{a_\tau }\tan \varphi \hfill \\
\end{gathered} \right.\]$$")
![$\[{a_n} = {{\dot \varphi }^2}l,{a_\tau } = \ddot \varphi l\]$](https://dxdy.ru/math/cc5b8a5d1a4bb4aec6c7d64e774de68482.png "$\[{a_n} = {{\dot \varphi }^2}l,{a_\tau } = \ddot \varphi l\]$")
![$$\[\ddot \varphi = \frac{g}{l}\sin \varphi \]$$](https://dxdy.ru/math/e6aa3d435b40d56ab0b0d1a18e5d375182.png "$$\[\ddot \varphi = \frac{g}{l}\sin \varphi \]$$")


![$\[\ddot \varphi l = \left| {\ddot \varphi } \right|l\]$](https://dxdy.ru/math/422cd8a06e8aa473581a7fdd6379610182.png "$\[\ddot \varphi l = \left| {\ddot \varphi } \right|l\]$")
![$\[\overline {{a_\tau }} \]$](https://dxdy.ru/math/f48f655d2af3289fd9062ebb543dcff482.png "$\[\overline {{a_\tau }} \]$")














^2+\vec{e_\varphi}\,\ddot\varphi$")
^2-\vec{e_\rho}\,\ddot\varphi$")

^2)\vec{e_\rho}+\frac{1}{\rho}\frac{d(\rho^2\dot\varphi)}{dt}\vec{e_\varphi}$")



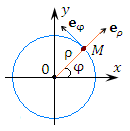
![$\[\mathop {\overrightarrow {{R_M}} }\limits^{..} \]$](https://dxdy.ru/math/deaaae0e6f70f8a75b111f437f6db06782.png "$\[\mathop {\overrightarrow {{R_M}} }\limits^{..} \]$")
![$$\[\mathop {\overrightarrow {{R_M}} }\limits^{..} = (\ddot \rho - \rho {(\dot \varphi )^2})\overrightarrow {{e_\rho }} + \frac{1}{\rho }\frac{{d({\rho ^2}\dot \varphi )}}{{dt}}\overrightarrow {{e_\varphi }} = (\ddot \rho - \rho {(\dot \varphi )^2})\overrightarrow {{e_\rho }} + \left( {2\dot \rho \dot \varphi + \rho \ddot \varphi } \right)\overrightarrow {{e_\varphi }} \]$$](https://dxdy.ru/math/35c475e5110bb20a61854a4b639fad6982.png "$$\[\mathop {\overrightarrow {{R_M}} }\limits^{..} = (\ddot \rho - \rho {(\dot \varphi )^2})\overrightarrow {{e_\rho }} + \frac{1}{\rho }\frac{{d({\rho ^2}\dot \varphi )}}{{dt}}\overrightarrow {{e_\varphi }} = (\ddot \rho - \rho {(\dot \varphi )^2})\overrightarrow {{e_\rho }} + \left( {2\dot \rho \dot \varphi + \rho \ddot \varphi } \right)\overrightarrow {{e_\varphi }} \]$$")
![$\[\rho = l = \operatorname{const} \]$](https://dxdy.ru/math/e6db3b83a670f631fb1a56ff5642954b82.png "$\[\rho = l = \operatorname{const} \]$")
![$$\[\overrightarrow a = \mathop {\overrightarrow {{R_M}} }\limits^{..} = - l{(\dot \varphi )^2}\overrightarrow {{e_\rho }} + l\ddot \varphi \overrightarrow {{e_\varphi }} = {a_n}\overrightarrow {{e_\rho }} + {a_\tau }\overrightarrow {{e_\varphi }} \]$$](https://dxdy.ru/math/fc508cf80db1f0059fd5947d66515ba782.png "$$\[\overrightarrow a = \mathop {\overrightarrow {{R_M}} }\limits^{..} = - l{(\dot \varphi )^2}\overrightarrow {{e_\rho }} + l\ddot \varphi \overrightarrow {{e_\varphi }} = {a_n}\overrightarrow {{e_\rho }} + {a_\tau }\overrightarrow {{e_\varphi }} \]$$")

![$\[{a_\tau }\]$](https://dxdy.ru/math/975a04c0d6b80184d535204fccc2873882.png "$\[{a_\tau }\]$")
![$$\[\overrightarrow a = - \mathop {\overrightarrow {{R_M}} }\limits^{..} \]$$](https://dxdy.ru/math/c6b11d447d2323c268e7b4fa5405887682.png "$$\[\overrightarrow a = - \mathop {\overrightarrow {{R_M}} }\limits^{..} \]$$")

