|
i |
Ende
Исправлена опечатка в формуле. |
В этом параграфе мы рассмотрим одну специальную систему отсчёта, которая подарит нам два новых объекта.
Также примем сокращающее выкладки соглашение: конструкцию

будем понимать как

, где

— любое выражение, имеющее по меньшей мере два перечисленных в угловых скобках индекса, находящихся на одном уровне. Если конструкция заключена в скобки, то исключительно в скобках она и действует:
+w_{ik}\equiv u_{ik}-u_{ki}+w_{ik}$")
.
§3 Синхронная система отсчётаЗапишем общий вид квадрата интервала в координатах, сопутствующих некоторой системе отсчёта:
^2 =\left(h\; dx^0-a_i\; dx^i\right)^2-\overline g_{ik}\;dx^i \;dx^k $$")
и рассмотрим ситуацию, когда выражение в скобках является полным дифференциалом. То есть, когда существует такая функция

, что

. При заданных

и

функцию
можно найти из системы
$$")
Критерием интегрируемости подобных систем является равенство смешанных производных неизвестной функции, вычисленных "в силу системы". В данном случае это даёт условия
$$")
Выясним, как ведут себя эти условия при хронометрических преобразованиях. Для этого перепишем соотношения
$")
в следующей форме
\\
\end{array} } \right. $$")
Далее последовательно находим
![$h_{,i}=\sigma \; ( x^{\tilde 0}_{,0}\;\tilde h)_{,i}=\sigma \left[x^{\tilde 0}_{,0i}\;\tilde h+x^{\tilde 0}_{,0}\left({\tilde h}_{,\tilde 0}\; x^{\tilde 0}_{,i}+{\tilde h}_{,\tilde k}\; x^{\tilde k}_{,i}\right)\right]$
$](https://dxdy.ru/math/57be6dbf7b4424c14c740986325c180a82.png "$h_{,i}=\sigma \; ( x^{\tilde 0}_{,0}\;\tilde h)_{,i}=\sigma \left[x^{\tilde 0}_{,0i}\;\tilde h+x^{\tilde 0}_{,0}\left({\tilde h}_{,\tilde 0}\; x^{\tilde 0}_{,i}+{\tilde h}_{,\tilde k}\; x^{\tilde k}_{,i}\right)\right]$
$")
![$a_{i,0}=\sigma \;( x^{\tilde k}_{,i}\;a_{\tilde k}- x^{\tilde 0}_{,i}\;\tilde h)_{,0}=\sigma \left[- x^{\tilde 0}_{,i0}\;\tilde h+x^{\tilde 0}_{,0}\left(
x^{\tilde k}_{,i}\;a_{\tilde k,\tilde 0}- x^{\tilde 0}_{,i}\;{\tilde h}_{,\tilde 0}\right)\right]
$](https://dxdy.ru/math/ff0d4a91d175c1d303509da6e7f5ca8882.png "$a_{i,0}=\sigma \;( x^{\tilde k}_{,i}\;a_{\tilde k}- x^{\tilde 0}_{,i}\;\tilde h)_{,0}=\sigma \left[- x^{\tilde 0}_{,i0}\;\tilde h+x^{\tilde 0}_{,0}\left(
x^{\tilde k}_{,i}\;a_{\tilde k,\tilde 0}- x^{\tilde 0}_{,i}\;{\tilde h}_{,\tilde 0}\right)\right]
$")
= \dfrac \sigma h \; x^{\tilde 0}_{,0} \; x^{\tilde k}_{,i} \left( {\tilde h}_{,\tilde k}+ a_{\tilde k,\tilde 0} \right)=x^{\tilde k}_{,i}\cdot\dfrac 1 {\tilde h} \left( {\tilde h}_{,\tilde k}+ a_{\tilde k,\tilde 0} \right)$")
Введём обозначение для только что полученного объекта
 \eqno (3,3)$$")
который преобразуется по закону
$$")
и тем самым является хивектором.
Так же поступаем со второй строчкой
$")
:
_{,k}-\langle i k \rangle=$")
![$=\sigma \left[ x^{\tilde s}_{,i}\left(a_{\tilde s,\tilde 0}\;x^{\tilde 0}_{,k}+a_{\tilde s, \tilde m}\;x^{\tilde m}_{,k}\right)- x^{\tilde 0}_{,i}\left({\tilde h}_{,\tilde 0}\;x^{\tilde 0}_{,k}+{\tilde h}_{,\tilde m}\;x^{\tilde m}_{,k}\right)\right]-\langle i k \rangle=$](https://dxdy.ru/math/e9991afb691dbfc4eac9e1989f191e2d82.png "$=\sigma \left[ x^{\tilde s}_{,i}\left(a_{\tilde s,\tilde 0}\;x^{\tilde 0}_{,k}+a_{\tilde s, \tilde m}\;x^{\tilde m}_{,k}\right)- x^{\tilde 0}_{,i}\left({\tilde h}_{,\tilde 0}\;x^{\tilde 0}_{,k}+{\tilde h}_{,\tilde m}\;x^{\tilde m}_{,k}\right)\right]-\langle i k \rangle=$")
![$=\sigma\;x^{\tilde s}_{,i}\left[x^{\tilde 0}_{,k} \left(a_{\tilde s,\tilde 0}+{\tilde h}_{,\tilde s}\right)+a_{\tilde s, \tilde m}\;x^{\tilde m}_{,k}\right]-\langle i k \rangle=$](https://dxdy.ru/math/fb086ff793c972c40c19c140baf468b782.png "$=\sigma\;x^{\tilde s}_{,i}\left[x^{\tilde 0}_{,k} \left(a_{\tilde s,\tilde 0}+{\tilde h}_{,\tilde s}\right)+a_{\tilde s, \tilde m}\;x^{\tilde m}_{,k}\right]-\langle i k \rangle=$")
![$=\sigma\;x^{\tilde s}_{,i}\left[ \left(x^{\tilde m}_{,k}\;a_{\tilde m}-\sigma\;a_k\right)\theta_{\tilde s}+a_{\tilde s, \tilde m}\;x^{\tilde m}_{,k}\right]-\langle i k \rangle=$](https://dxdy.ru/math/602dcd63507d2b126aac0c060104076d82.png "$=\sigma\;x^{\tilde s}_{,i}\left[ \left(x^{\tilde m}_{,k}\;a_{\tilde m}-\sigma\;a_k\right)\theta_{\tilde s}+a_{\tilde s, \tilde m}\;x^{\tilde m}_{,k}\right]-\langle i k \rangle=$")
-\langle i k \rangle$")
что можно переписать так
-\langle i k \rangle=$")
$")
и ввести ещё один объект
$$")
преобразующийся по закону
$$")
отличающемуся от хитензорного наличием дополнительного множителя

.
В предыдущем параграфе нам уже встречалась величина

, преобразующаяся, согласно
$")
, похожим образом. Такое разнообразие заслуживает нового определения. А именно, расширим понятие хитензора на объекты, преобразующиеся по законам
$")
,
$")
и им подобным. При этом объекты, содержащие в законе преобразования сигму, будем называть
Т-нечётными хитензорами, а не содержащие —
Т-чётными.
Для наглядности перечислим все рассмотренные на данный момент объекты в форме таблички:

В дальнейшем список этот не только будет пополнен, но даже обогатится ещё одним бинарным признаком.
Однако вернёмся к условиям интегрирования
, которые теперь можно переписать в форме
$$")
из которой очевидна их инвариантность относительно хронометрических преобразований. Следовательно, эти условия выполняются (или не выполняется) для любых координат, сопутствующих фиксированной системе отсчёта.
Таким образом мы можем сказать, что возможность обладать (либо не обладать) столь замечательной функцией
, свойства которой описаны выше, является характеристическим свойством самой системы отсчёта.
Если система отсчёта введена так, что выполнены условия
$")
, то её принято называть
синхронной . Это обстоятельство связано с тем, что всегда можно совершить хронометрическое преобразование, объявляющее функцию
новой нулевой координатой

, после чего интервал примет канонический вид
^2 =\left(dx^0\right)^2-\overline g_{ik}\;dx^i \;dx^k \eqno (3,8)$$") Задача
ЗадачаВычислите свёртки

и

для любого понравившегося вам интервала. Индексы поднимайте при помощи

.

^2 =\left(dx^0\right)^2-\delta_{ik}\,dx^i\,dx^k\,,$")











![$$(\delta s)^2 =\left( 1-\dfrac{1}{r} \right) (dt)^2-\dfrac{r}{r-1} (dr)^2-r^2 \left[ (d \theta )^2+\sin^2(\theta) (d \varphi)^2 \right]\,. $$](https://dxdy.ru/math/52d26a64876686e29a017f6b0f8f6fc282.png "$$(\delta s)^2 =\left( 1-\dfrac{1}{r} \right) (dt)^2-\dfrac{r}{r-1} (dr)^2-r^2 \left[ (d \theta )^2+\sin^2(\theta) (d \varphi)^2 \right]\,. $$")



^2\sqrt{1-1/x^1}}\,.$$")


}.$$")


^2}$")
^3(x^1-1)}\,.$$")










= \dfrac \sigma h \; x^{\tilde 0}_{,0} \; x^{\tilde k}_{,i} \left( {\tilde h}_{,\tilde k}+{\tilde a}_{\tilde k,\tilde 0} \right)=x^{\tilde k}_{,i}\cdot\dfrac 1 {\tilde h} \left( {\tilde h}_{,\tilde k}+{\tilde a}_{\tilde k,\tilde 0} \right)$")
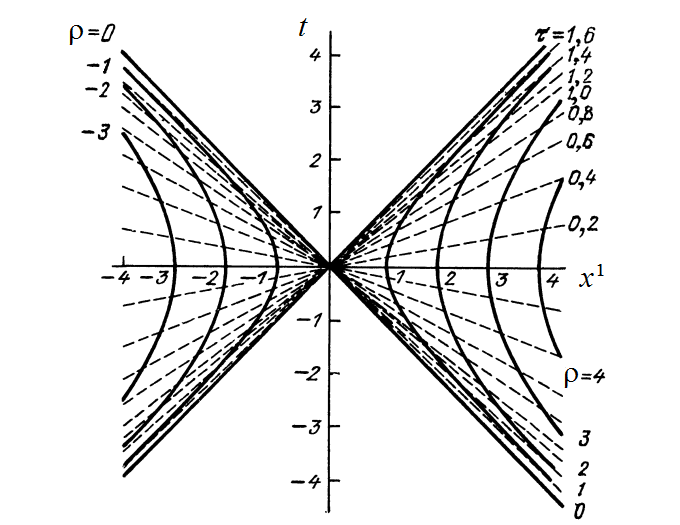
^2=(\rho\;d\tau)^2-(d\rho)^2 \eqno (a,1)$$")



 \\
\end{array} } \right. \eqno (a,2)$$")
^2$$")


^2}{\rho^2-\dot{\rho}^2}$$")


![$$\rho=\dfrac{A(x^1)}{\operatorname{ch}\left[x^0+B(x^1)\right]}$$](https://dxdy.ru/math/bb3d94e74961593cabd4b527403e579182.png "$$\rho=\dfrac{A(x^1)}{\operatorname{ch}\left[x^0+B(x^1)\right]}$$")
}$$")
}
, \qquad a_1=-\operatorname{th}(x^0), \qquad \overline{g}{}_{11}=1}$$")
\right)$$")
 \\
x^1=\rho\;\operatorname{ch}(\tau) \\
\end{array} } \right. \eqno (a,3)$$")
^2=(dt)^2-(dx^1)^2 \eqno (a,4)$$")
$")
$")
 \\
x^1=\rho\;\operatorname{sh}(\tau) \\
\end{array} } \right. \eqno (a,3)$$")



:$")







.$")






