Постановка задачи: рассмотреть возможность уменьшения амплитуд профиля инерционной нагрузки при тестировании ротора электромотора.
Инерционная нагрузка для тестирования электромотора в осевом (направлении оси ротора) направлении задана в виде таблицы (

- частота возбуждения,

- амплитуда ускорения):
![\begin{table}[]
\begin{tabular}{|c|c|}
\hline
Frequency \Omega {[}Hz{]} & Acc. Amplitude RMS A_1 {[}\frac{m}{s^2}{]}\\ \hline
20 & 1.5 \\ \hline
50 & 1.5 \\ \hline
60 & 0.8 \\ \hline
\ldots & \ldots \\ \hline
1880 & 3.7 \\ \hline
2000 & 3.7 \\ \hline
\end{tabular}
\end{table}](https://dxdy.ru/math/06f8b22da184301c383bde1c743ca49182.png "\begin{table}[]
\begin{tabular}{|c|c|}
\hline
Frequency \Omega {[}Hz{]} & Acc. Amplitude RMS A_1 {[}\frac{m}{s^2}{]}\\ \hline
20 & 1.5 \\ \hline
50 & 1.5 \\ \hline
60 & 0.8 \\ \hline
\ldots & \ldots \\ \hline
1880 & 3.7 \\ \hline
2000 & 3.7 \\ \hline
\end{tabular}
\end{table}")
Данная инерционная нагрузка определена для Environmental Testing электромотора, который жестко крепится к скользящему столу шейкера с помощью специального массивного адаптера (fixture).
Профиль ускорения прилагается к адаптеру, таким образом, что в одной или нескольких контрольных точках измеряется ускорение и реализуется контроль его амплитуды (используется допустимых коридор между верхним и нижним допустимым значением амплитуды). Скорость изменения частоты возбуждения - 1/3 октавы в минуту. После прогонки частоты возбуждения от минимального до максимального значения, происходит симметричное уменьшение частоты в обратном направлении. Медленно вращаясь, т.к. без вращения образуются раковины в подшипниках, мотор тестируется, таким образом, 24 часа.
Пример испытуемого электромотора (DUT):

Пример скользящего стола шейкера с закрепленным с помощью адаптера электромотором:

Вопрос: можно ли из физических соображений уменьшить инерционную нагрузку, если требуется тестировать не мотор целиком, а только ротор мотора?
Из уравнений простейшей одномассовой модели следует, что нельзя. Но прав ли я на самом деле, ведь не были учтены потери энергии при соударениях в подшипниках и демпфирование?
Ход рассуждений. Предполагаем, что можно использовать двухмассовую модель (масса - пружина) и что инерционная нагрузка идеально распределена в статоре. Тогда:
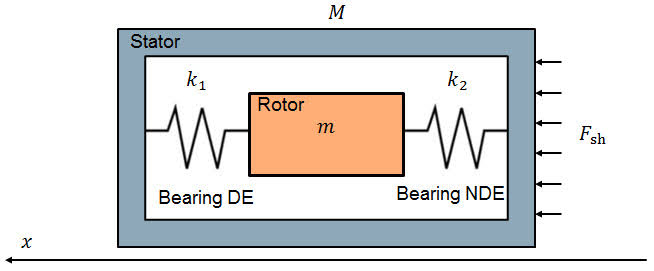
Уравнения движения:
 + k_2\bigl(x_1 - x_2\bigr)=F_{\rm s h} \\
m\ddot x_{2} - k_1\bigl(x_1 - x_2\bigr) - k_2\bigl(x_1 - x_2\bigr)=0
\end{cases}
$$")
Здесь

- масса статора и ротора,

- жесткость подшипников в направлении оси мотора,

- перемещение статора и ротора.
Условие идеального распределения инерционной нагрузки в статоре:
 \quad \Rightarrow \quad x_{1}=-\frac{A_1} {\nu^2} \cos(\nu t)
$$")
Откуда получаем:
x_2 = \bigl(k_1 + k_2\bigr)x_1 = -\frac{A_1} {\nu^2}\bigl(k_1 + k_2\bigr) \cos(\nu t)
$$")
или, обозначив

,

собственную частоту и амплитуду возбуждения:
, \quad \textsf{где} \quad \omega^2 = \frac{k_1 + k_2} {m},
\quad f=A_1 {\Bigl(\frac{\omega}{\nu}\Bigr)}^2$$")
Частное (установившееся) решение последнего уравнения:
$$")
и следовательно:
= \frac{\omega^2}{\omega^2 - \nu^2} A_1 \cos (\nu t)$$")
или
, \quad \textsf{где} \quad A_2=\frac{\omega^2}{\omega^2 - \nu^2} A_1 $$")
И, следовательно, если пренебречь потерями энергии, то

. То есть, получается, что профиль амплитуды инерционной нагрузки ротора уменьшить нельзя.
