Так же в порядке эксперимента было сделано следующее но по-моему это тупиковый вариант:
(Оффтоп)
Повернём систему координат так чтобы
$")
и переформулируем уравнение (3) в терминах

:

, а так же получим

. Заменив

,

, получим в итоге такое уравнение:

. В нём нет явной тригонометрии, и в нём явно указаны компоненты

искомой кривой, но кажется это ничем не помогает его решить.
Само поведение
$")
можно наглядно описать с помощью следующей картинки (нарисовано в системе координат где ось

параллельна

):
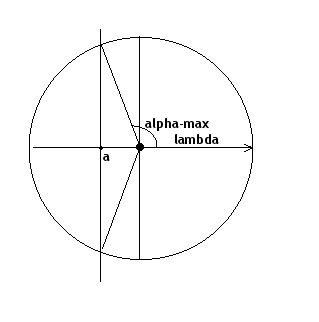
Угол
не может приводить к

. В самой точке

происходит разворот вращения вектора направления

- смена знака

. Если

то эта точка отсутствует.Если

то в этой точке будет

и

- то есть попасть в ней можно только из соответствующего начального условия, и кривая тогда будет строго прямой (это одно из решений, которое не следует забывать). Поведение
в целом напоминает поведение физического маятника, с вектором "гравитационного поля"

и полной энергией

. Возможно, оно даже в точности с ним совпадает, но в данном случае это незачем выяснять.
Введём

, тогда из уравнений (3), (4) и (5) можно вынести
за скобки, и теперь при увеличении/уменьшении
, при сохранении постоянным

, график
$")
будет кратно сжиматься/растягиваться вдоль оси

, а искомая кривая - кратно сжиматься/растягиваться по обеим своим осям. Поэтому для упрощения дальнейших расчётов можно взять

, а затем уже готовые решения просто масштабировать в зависимости от этого параметра.
Теперь рассмотрим случай, который был заявлен в самом начале задачи - много фиксированных точек, через которые надо провести кривую. Очевидно, что каждый из сегментов этой кривой в отдельности будет решением своей задачи - он будет давать локальный минимум функционала при зафиксированных
$")
,
$")
,
$")
,
$")
. Если бы это было не так, то можно было бы, не трогая остальную кривую, заменить этот сегмент на более оптимальный, получив лучшую кривую в целом.
Если проварьировать полный интеграл по всей кривой, получим сумму значений, посчитанных по формуле (1) для каждого сегмента. Интегральные слагаемые нулевые, так как сегмент - решение более простой задачи выше, неинтегральные слагаемые с множителем

нулевые, так как в фиксированных точках

. Из оставшегося слагаемого сокращается всё, кроме двух раз, если учесть дифференцируемость кривой (

не меняет свой значение в точках сопряжения) и следующее из этого необходимое условие отсутствия ступенек

в этих же точках. Остаётся только
![$$\sum_k \frac {dS_k}{d\varepsilon} = \sum_k \left[ L_{\vec f''} \vec g' \right]_{T_k}^{T_{k+1}} = \left[ L_{\vec f''} \vec g' \right]_{0}^{T} = \left[ 2 \vec v' \vec g' \right]_{0}^{T}$$](https://dxdy-02.korotkov.co.uk/f/9/c/b/9cbd8d841eafad9a373a63c951c176ae82.png "$$\sum_k \frac {dS_k}{d\varepsilon} = \sum_k \left[ L_{\vec f''} \vec g' \right]_{T_k}^{T_{k+1}} = \left[ L_{\vec f''} \vec g' \right]_{0}^{T} = \left[ 2 \vec v' \vec g' \right]_{0}^{T}$$")
Из необходимого равенства нулю этой производной и необходимости выполнять это при любых
следует условие
 = \vec v'(T) = 0$")
- то есть на самых крайних точках не должно быть искривления, что, вобщем-то, и так было интуитивно понятно.
Из условия сопряжения
 = L_{\vec f''}(T_k^-)$")
, оно же
 = \vec v'(T_k^-)$")
- сохранение кривизны в промежуточных точках, следует (с учётом уравнения (3)), что в этих точках должно сохраняться
$")
- проекция
на текущее направление кривой.
Осталось не очень понятным, как так вышло, что повороты направлений в промежуточных точках ни на что не влияют, но, вероятно, там не так просто их повернуть, не затронув что-то ещё. Думаю это станет яснее после расчёта кривых на сегментах.



 в крайних точках - оно считается или нет? Если да то вот оно второе.
в крайних точках - оно считается или нет? Если да то вот оно второе. в точках сопряжений.
в точках сопряжений. в точке сопряжения.
в точке сопряжения. , то вариационная задача в отдельных точках может включать только производные до порядка
, то вариационная задача в отдельных точках может включать только производные до порядка  , и потому в граничных точках
, и потому в граничных точках  условий, а в промежуточных
условий, а в промежуточных  условий. В то же время вы получаете ОДУ порядка
условий. В то же время вы получаете ОДУ порядка  и для него эти неравенства должны быть заменены на равенства. У вас
и для него эти неравенства должны быть заменены на равенства. У вас  но на концах по одному условию изначально (кривая проходит через нее). Вы получили
но на концах по одному условию изначально (кривая проходит через нее). Вы получили  в крайних точках. Это и есть второе условие. Каков его геометрический смысл?
в крайних точках. Это и есть второе условие. Каков его геометрический смысл?  !
! не имеет скачка). Каков его геометрический смысл?
не имеет скачка). Каков его геометрический смысл? 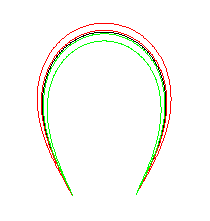
 = \arccos (-1/\lambda) = 0.65222 \pi, L=4.07$") ,
, =0, \vec f(L) = (0.6238, 0)$") , которая удовлетворяет условию нулевой первой вариации, а кривизна у неё на концах нулевая.
, которая удовлетворяет условию нулевой первой вариации, а кривизна у неё на концах нулевая.