Спасибо большое,
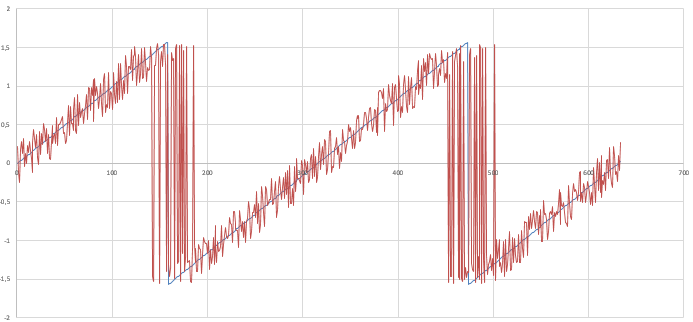
sergey zhukov! Да, именно такой у меня дребезг. Поверх этого накладывается еще то, что период может удлиняться или укорачиваться примерно на 5-10%. Надо в реальном времени в каждый момент времени правильный угол и современную длину периода.
Я смотрю в сторону МНК, но такой, когда вместо евклидовой нормы из числа вначале вычисляется косинус или синус и потом применяется эта евклидова норма, то есть примерно так:
, ~~ q<1,$$")
где

- вес, чтобы учесть числа, которые далеки от измеряемых сейчас, а

- то, что мне надо.
Тут, наверное, просто с шумом лучше побороться на аппаратном уровне, если он такой, что мы даже не можем понять на 2/3 периода, нужно прибавить

или отнять (или ничего не нужно делать).
не, на аппаратном уже все сделано, что можно. Это сигнал с мотора, вернее с катушек, который далее по известной формуле преобразуется в угол. Из-за того, что мотор в этот момент работает, там много переходных процессов и сигнал сильно зашумлен.
Пока эвристически наиболее хорошо угадывается точка перескока, если исходные данные аппроксимировать МНК с затуханием в один период), далее искать точку с максимальной производной, сдвигать все это на длину периода и, таким образом угадывать где добавлять два-пи, а где - нет, но пока все равно подглючивает, так как два МНК и пересчет периода - иногда приводят эту систему в ступор.








$")
