Добрый день, форумчане!
Вот, задался вопросом нахождения углов отклонения при решении инверсной кинематике. Всё получается, да вот только в каком-то месте закралась ошибка и я её не могу обнаружить. Прошу помощи!
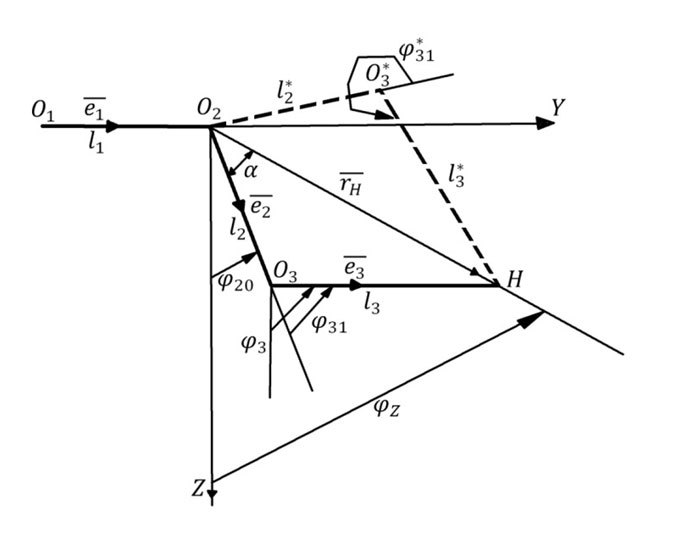
Задача. Дан трехзвенный механизм. Первое звено, длинной
27 мм, крепится к платформе в точке
О с координатами (
0,0) и располагается в плоскости координат XY. Назовем звено

. Второе звено, длиной
30 мм, крепиться к окончанию первого звена. Назовем звено

. Третье звено, длиной
50 мм, крепиться к окончанию второго звена. Назовем звено

. Второе и третье звенья движутся в вертикальной плоскости координат Z. Определить углы звеньев относительно друг друга, при условии, что окончание третьего звена располагается в точке
Н с координатами (
60,80,30).
Решение.
При решении поставленной задачи использовал формулы тригонометрии и методы решения треугольников, а также много литературы.
Первое, что мы можем измерить, это угол отклонения всей конструкции в плоскости координат XY (во всех формулах будем избавляться от радианов):
180/\pi=\arctg(60/80)180/\pi=53,13 $")
градуса. (первый угол поворота звеньев вокруг точки крепления О)
Для дальнейшего анализа, нам нужно посмотреть на плоскость координат YZ и все дальнейшие вычисления будем проводить только с этой плоскостью.
Так как звенья
и
отступают от начала координат на длину звена
, то требуется перенести начало координат:
=80-27\sin(53,13)=72,616$")
мм
Затем определим угол между гипотенузой катетов звеньев
и
(он нам понадобится):
180/\pi=\arctg(30/72,616)180/\pi=67,553$")
градуса.
Далее вычислим угол отклонения второго звена от гипотенузы:
180/\pi=14,046$")
градусов
где
числитель:

знаменатель:
^{1/2}=4714,192$")
Вроде бы с расчетами всё.
Теперь займемся проецированием:
Первый угол поворота всей системы в плоскости XY: XY=53,13 градуса
Второй угол поворота звена
вокруг точки крепления к звену
:
)=180-(14,046+67,553)=98,399$")
градусов
Третий угол поворота звена
вокруг точки крепления к звену
:
))180/\pi)-180)=157,579$")
градусов
где z:
/(2L_2L_3)=0,9244$")
=====
Вот вроде бы и всё решение, но почему-то все звенья цепи указывают не на саму точку в пространстве, а с небольшим смещением, в районе 5-10 мм.
Прошу помощи в решении данной задачи. Может где ошибка?
 и точку
и точку  . В этой плоскости вращаются звенья
. В этой плоскости вращаются звенья 180/\pi$")
)180/\pi$")
 - угол между осью
- угол между осью  и линией
и линией  ;
; так и остается;
так и остается; ;
; , а вот где - не могу определить.
, а вот где - не могу определить. .
. и
и  .
. 

 , с учетом
, с учетом  и одинаковым расстоянием по двум осям, получим
и одинаковым расстоянием по двум осям, получим  мм.
мм. , т.е. до 80 мм с каждой стороны с центром в точке соединения звеньев
, т.е. до 80 мм с каждой стороны с центром в точке соединения звеньев  , содержащей ось
, содержащей ось $") не лежит в ней?
не лежит в ней?$") - точка достижима
- точка достижима^2+30^2}=60,9 < (L_2+L_3)$") - не достижима (?), однако система уравнений отработала
- не достижима (?), однако система уравнений отработала
$")
$")