для того что бы это дело соответствовало Вашему рисунку и направлениям осей, нужно <...>
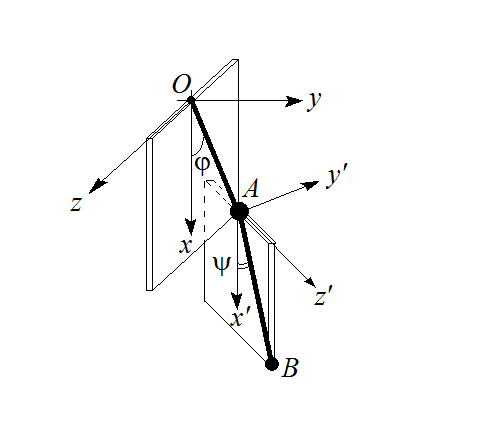
Рисунок условный, он поясняет угол между плоскостями и их вертикальность. Можно было бы изобразить маятник

отклонённым не "от нас", а "к нам", и тогда такой вопрос о знаке слагаемого с синусом наверное не возник бы, но тогда на рисунке был бы плохо виден угол между плоскостями. Понятно, что знак слагаемого с

зависит от выбора направления отсчёта

этот знак меняется при замене

на

Значения собственных частот от этого выбора не зависят.
Вообще странно что направление осей меняет ответ или это из-за того что это меняет направление положительного отсчета угла ?
Да, от выбора направлений отсчёта углов зависит в ответе знак в формулах нормальных колебаний, описывающих связь между
$")
и
.$")
Но спектр собственных частот от этого не зависит. Спектр собственных частот вообще не зависит от выбора обобщённых координат: если вместо
и

кто-нибудь воспользуется другими обобщёнными координатами, - двумя функциями
$")
и
,$")
- то у него должны получиться в ответе те же собственные частоты.
получилось уравнение

Это правильно.
 его оська есть
его оська есть  Оси декартовой системы координат
Оси декартовой системы координат  были изображены на рисунке
были изображены на рисунке  она движется (покачивается) параллельно самой себе. Оська нижнего маятника это
она движется (покачивается) параллельно самой себе. Оська нижнего маятника это  (обозначения массивных точек
(обозначения массивных точек  выше в сообщениях уже были). Орты для обеих плоскостей (штрихованные и нештрихованные) не меняют своих направлений с течением времени. Вертикаль:
выше в сообщениях уже были). Орты для обеих плоскостей (штрихованные и нештрихованные) не меняют своих направлений с течением времени. Вертикаль:  перпендикулярные ей и оськам маятников соответствующие направления есть
перпендикулярные ей и оськам маятников соответствующие направления есть  и
и  При этом задачка оказывается заметно проще, чем в вариантах с "вращающимися" плоскостями; вероятно поэтому авторы такой вариант и подразумевали.)
При этом задачка оказывается заметно проще, чем в вариантах с "вращающимися" плоскостями; вероятно поэтому авторы такой вариант и подразумевали.)


 Тогда радиус-векторы частиц в системе координат
Тогда радиус-векторы частиц в системе координат 

\,\mathbf{e}_x+\frac{\sqrt{3}}{2}\sin\psi\,\mathbf{e}_y+\left(\frac{1}{2}\sin\psi+\sin\varphi \right)\mathbf{e}_z$$") Кинетическая энергия (обозначаю скалярное произведение скобками с точкой между векторными сомножителями):
Кинетическая энергия (обозначаю скалярное произведение скобками с точкой между векторными сомножителями): +\frac{1}{2}\,(\dot{\mathbf{r}}_B\cdot\dot{\mathbf{r}}_B)$$") Потенциальная энергия:
Потенциальная энергия: -(\mathbf{r}}_B\cdot\mathbf{g})=-4\cos\varphi-\cos\psi,$$") где
где 

 Система двух однородных уравнений Лагранжа в итоге даёт квадратное уравнение для квадрата частоты:
Система двух однородных уравнений Лагранжа в итоге даёт квадратное уравнение для квадрата частоты: ^2-32\,\omega^2+16=0$$")
 .
.$$")

\,\mathbf{e}_x+\frac{\sqrt{3}}{2}\sin\psi\,\mathbf{e}_y+\left(\frac{1}{2}\sin\psi-\sin\varphi \right)\mathbf{e}_z$$")

 с частотой
с частотой  и
и  с частотой
с частотой  .
. и соответственно частоты как у
и соответственно частоты как у  малых колебаний на школьном уровне физиков-техников (которые больше знакомы с паяльником, чем с теоремами). Объясняю тривиально и может быть неправильно тем, что речь идёт о
малых колебаний на школьном уровне физиков-техников (которые больше знакомы с паяльником, чем с теоремами). Объясняю тривиально и может быть неправильно тем, что речь идёт о \mathbf{q}=0,$") где (говорю нестрогими словами, строгих определений наверное не знаю)
где (говорю нестрогими словами, строгих определений наверное не знаю)  - "динамическая матрица" с подходящими свойствами,
- "динамическая матрица" с подходящими свойствами,  - вектор амплитуд обобщённых координат,
- вектор амплитуд обобщённых координат,  - единичная матрица. Значения
- единичная матрица. Значения  определяются уравнением
определяются уравнением =0.$")
 в такой (т.е. в линеаризованной) задаче динамики это обратимое линейное преобразование векторов
в такой (т.е. в линеаризованной) задаче динамики это обратимое линейное преобразование векторов  Так что задаче с новыми
Так что задаче с новыми L^{-1}\mathbf{q}'=0.$") А поскольку определитель произведения матриц равен произведению их определителей, и
А поскольку определитель произведения матриц равен произведению их определителей, и ^{-1},$") то
то L^{-1})=\det(D-\lambda E).$") Т.е. уравнение для
Т.е. уравнение для