Вопрос как раз заключается в том, правильна ли формула -

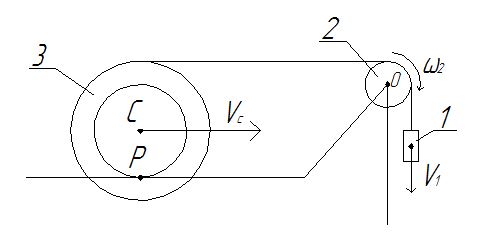
, рассуждал так: знаю, что, если бы нить связывала тело 2 с малым радиусом тела 3, который катится по поверхности, тогда формула была бы

, но так как нить связана с бОльшим радиусом, то добавил

.
Теперь знаю, что я не прав, но не понимаю как нужно учесть то, что нить связана с бОльшим радиусом, а тело катится опираясь на меньший радиус.

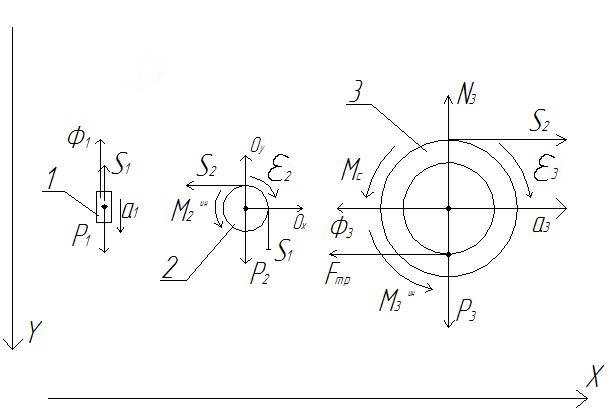
- радиус инерции тела 3 относительно горизонтальной оси, проходящей через его центр тяжести

- коэффициент трения качения, но на данном этапе он не нужен.
В остальном у меня всё правильно
$")
?
















































\frac{V_1^2}{2} = m^\text{пр} \frac{V_1^2}{2}$")







 = 3m (g - 0.68g) = 0.96$")






