Уважаемые участники,
Мне опять попалась задачка (не из Методички), которая упрямо не хочет решаться.
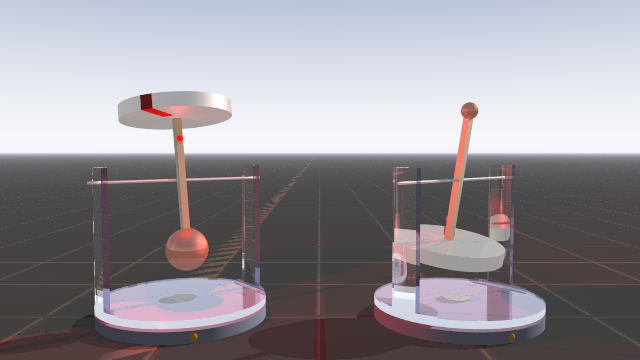
Суть проблемы: не могу "привязать" волчок ни за какую точку, чтобы он переворачивался, не сдвигаясь с места.
Свободный же волчок переворачивается очень охотно. В прищепке - симуляция, сделанная сравнительно простым скриптом в линухе. Никаких мышей, только командная строка и vi. Виндовс-технологиями не владею, поскольку меня полностью устраивает текущая ситуация, с командной строкой и вёрсткой в LaTeX.
Выложил бы и скрипт в архиве, но вложения мне запрещены вроде, а жаль. Напрямую там таки под 1000 строк, прямым текстом в форуме выложить не годится. Такой вот "open source".
Первый кадр анимации:
Ссылка на полную видюшку (56 секунд, 1400 кадров, до падения и успокоения волчка). Масштаб времени 4:1, 4 секунды экранного времени = 1 секунда реального.
https://streamable.com/oenx7(Рекламы там нет, только залитая мною видюшка на голом экране. Закольцованная сервером и смазанная кодеком)
Как думаете, можно ли привязать волчок за какую-то неподвижную точку, чтобы он переворачивался? У В.И.Арнольда получалось и покруче, он даже поиронизировал, что решение есть в КАМ-теории. Но это ж Арнольд, он понимал. Некоторые участники, наверное, могли бы подсказать книги под не вхлам глупого 3-курсника физфака. Я хотя бы читаю текст по существу, а не пропуская формулы, доказательства и вообще суть идеи.