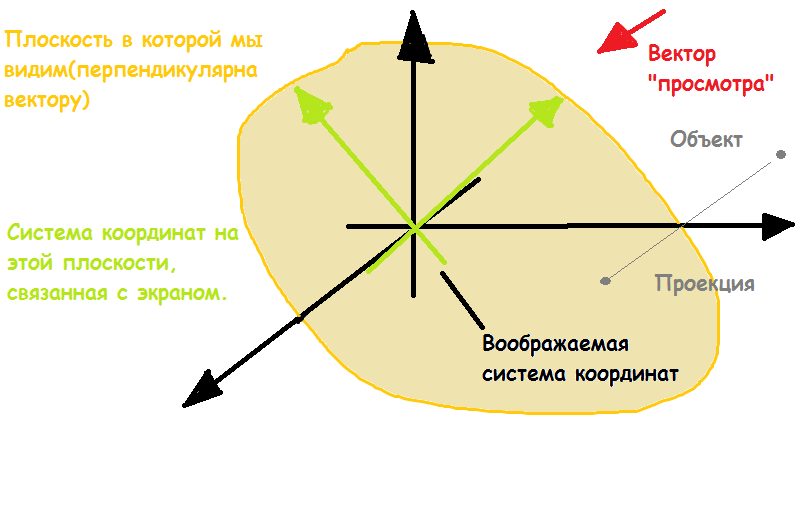
У нас есть две системы координат:
1) Синяя, физическая (Вы называете её виртуальной). Векторы, проведенные из её начала, обозначены большими буквами.
2) Зелёная, наблюдателя. Векторы, проведенные из её начала, обозначены маленькими буквами.
В каждой из систем выбран базис (жирные векторы) — правая тройка ортонормированных векторов.
Для наглядности можете считать, что базисные векторы системы наблюдателя привязаны к голове воображаемого наблюдателя.
Начало отсчета находится на переносице.
 направлен вправо (по отношению к голове);
направлен вправо (по отношению к голове);
 направлен к подбородку;
направлен к подбородку;
 направлен вперед.
направлен вперед.Вектор

задает положение наблюдателя в физической системе.
Положение объекта в физической системе обозначим

, в системе наблюдателя

— это радиус-векторы, проведенные из начала соответствующей системы к объекту.
Координатами объекта в данной системе называются коэффициенты разложения радиус-вектора объекта по базисным векторам:

При этом

По правилу треугольника

.
Опираясь на эту информацию, решите важную вспомогательную задачу.
Даны физические координаты объекта

.
Найти его координаты в системе наблюдателя

.
После этого «экранные» координаты найти уже совсем просто.